 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhotonic architecture for reinforcement learning
Jul 17, 2019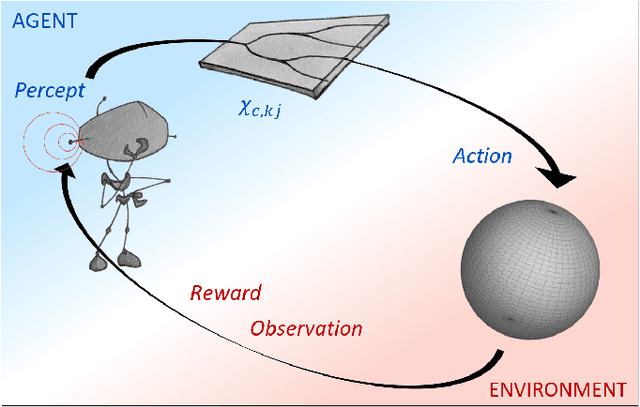
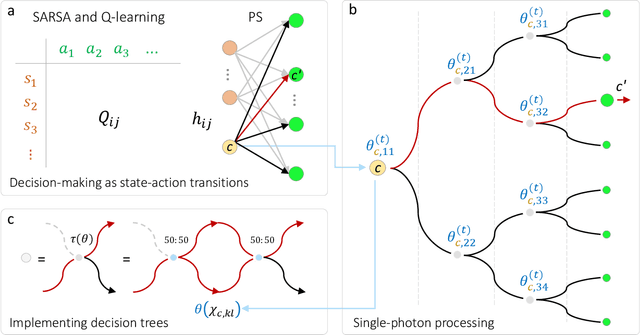
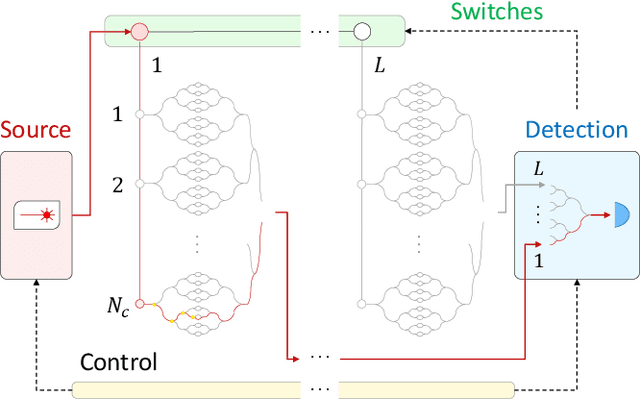
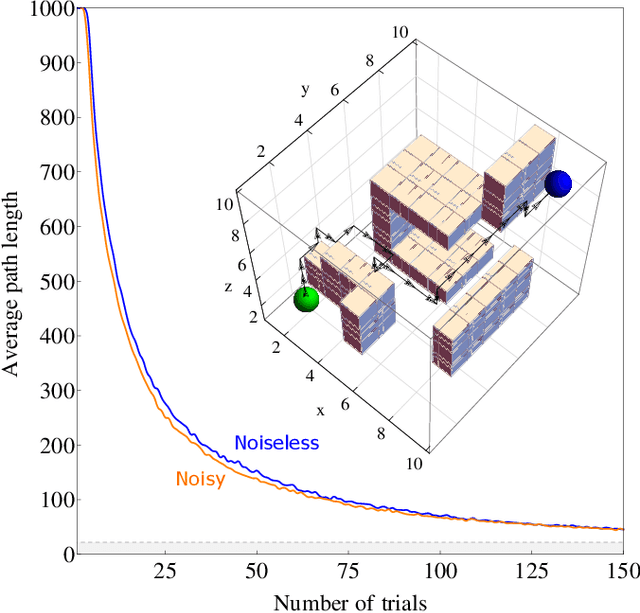
The last decade has seen an unprecedented growth in artificial intelligence and photonic technologies, both of which drive the limits of modern-day computing devices. In line with these recent developments, this work brings together the state of the art of both fields within the framework of reinforcement learning. We present the blueprint for a photonic implementation of an active learning machine incorporating contemporary algorithms such as SARSA, Q-learning, and projective simulation. We numerically investigate its performance within typical reinforcement learning environments, showing that realistic levels of experimental noise can be tolerated or even be beneficial for the learning process. Remarkably, the architecture itself enables mechanisms of abstraction and generalization, two features which are often considered key ingredients for artificial intelligence. The proposed architecture, based on single-photon evolution on a mesh of tunable beamsplitters, is simple, scalable, and a first integration in portable systems appears to be within the reach of near-term technology.
Modeling Non-Functional Application Domain Constraints for Component-Based Robotics Software Systems
Jan 11, 2016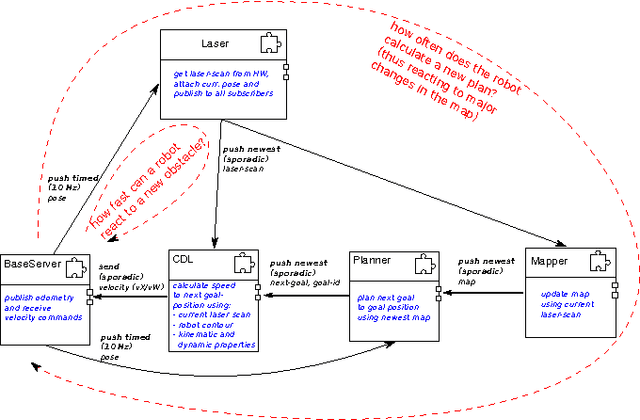
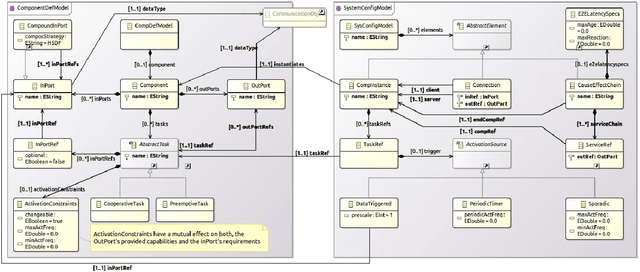
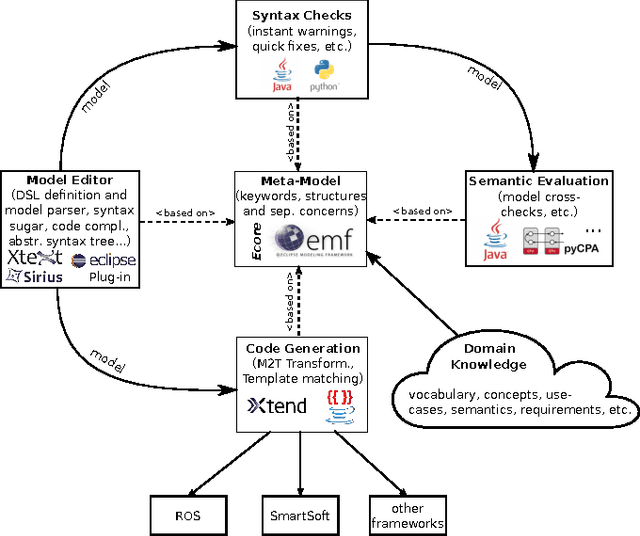
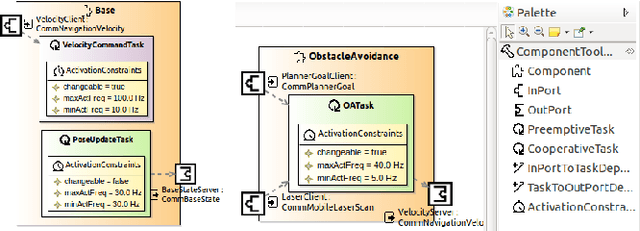
Service robots are complex, heterogeneous, software intensive systems built from components. Recent robotics research trends mainly address isolated capabilities on functional level. Non-functional properties, such as responsiveness or deterministic behavior, are addressed only in isolation (if at all). We argue that handling such non-functional properties on system level is a crucial next step. We claim that precise control over application-specific, dynamic execution and interaction behavior of functional components -- i.e. clear computation and communication semantics on model level without hidden code-defined parts -- is a key ingredient thereto. In this paper, we propose modeling concepts for these semantics, and present a meta-model which (i) enables component developers to implement component functionalities without presuming application-specific, system-level attributes, and (ii) enables system integrators to reason about causal dependencies between components as well as system-level data-flow characteristics. This allows to control data-propagation semantics and system properties such as end-to-end latencies during system integration without breaking component encapsulation.