 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDealing with Run-Time Variability in Service Robotics: Towards a DSL for Non-Functional Properties
Mar 18, 2013

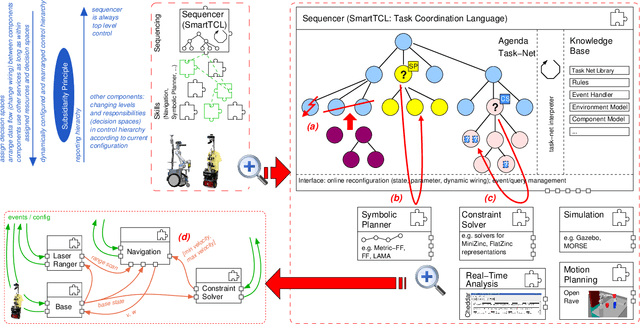

Service robots act in open-ended, natural environments. Therefore, due to combinatorial explosion of potential situations, it is not possible to foresee all eventualities in advance during robot design. In addition, due to limited resources on a mobile robot, it is not feasible to plan any action on demand. Hence, it is necessary to provide a mechanism to express variability at design-time that can be efficiently resolved on the robot at run-time based on the then available information. In this paper, we introduce a DSL to express run- time variability focused on the execution quality of the robot (in terms of non-functional properties like safety and task efficiency) under changing situations and limited resources. We underpin the applicability of our approach by an example integrated into an overall robotics architecture.