 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Would an LLM Do? Evaluating Policymaking Capabilities of Large Language Models
Sep 04, 2025Large language models (LLMs) are increasingly being adopted in high-stakes domains. Their capacity to process vast amounts of unstructured data, explore flexible scenarios, and handle a diversity of contextual factors can make them uniquely suited to provide new insights for the complexity of social policymaking. This article evaluates whether LLMs' are aligned with domain experts (and among themselves) to inform social policymaking on the subject of homelessness alleviation - a challenge affecting over 150 million people worldwide. We develop a novel benchmark comprised of decision scenarios with policy choices across four geographies (South Bend, USA; Barcelona, Spain; Johannesburg, South Africa; Macau SAR, China). The policies in scope are grounded in the conceptual framework of the Capability Approach for human development. We also present an automated pipeline that connects the benchmarked policies to an agent-based model, and we explore the social impact of the recommended policies through simulated social scenarios. The paper results reveal promising potential to leverage LLMs for social policy making. If responsible guardrails and contextual calibrations are introduced in collaboration with local domain experts, LLMs can provide humans with valuable insights, in the form of alternative policies at scale.
The Use of Synthetic Data to Train AI Models: Opportunities and Risks for Sustainable Development
Aug 31, 2023In the current data driven era, synthetic data, artificially generated data that resembles the characteristics of real world data without containing actual personal information, is gaining prominence. This is due to its potential to safeguard privacy, increase the availability of data for research, and reduce bias in machine learning models. This paper investigates the policies governing the creation, utilization, and dissemination of synthetic data. Synthetic data can be a powerful instrument for protecting the privacy of individuals, but it also presents challenges, such as ensuring its quality and authenticity. A well crafted synthetic data policy must strike a balance between privacy concerns and the utility of data, ensuring that it can be utilized effectively without compromising ethical or legal standards. Organizations and institutions must develop standardized guidelines and best practices in order to capitalize on the benefits of synthetic data while addressing its inherent challenges.
Proceedings of the Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob 2015)
Jan 20, 2016The Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'15) was held September 28, 2015 in Hamburg (Germany), as part of the IROS 2015 conference. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Proceedings of the Fifth International Workshop on Domain-Specific Languages and Models for Robotic Systems
Nov 26, 2014The Fifth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'14) was held in conjunction with the 2014 International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2014), October 2014 in Bergamo, Italy. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Proceedings of Third Workshop on Robots and Sensors integration in future rescue INformation system
Apr 07, 2014This is the proceedings of the third workshop on Robots and Sensors integration in future rescue INformation system (ROSIN 2013)
A Top-Down Approach to Managing Variability in Robotics Algorithms
Dec 29, 2013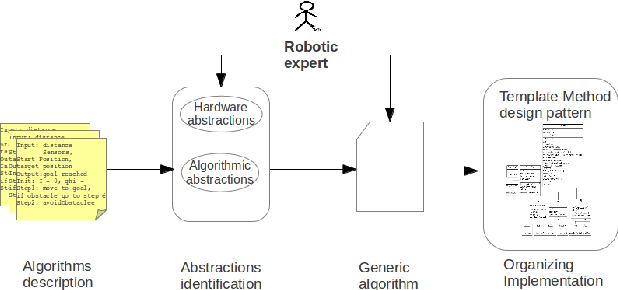
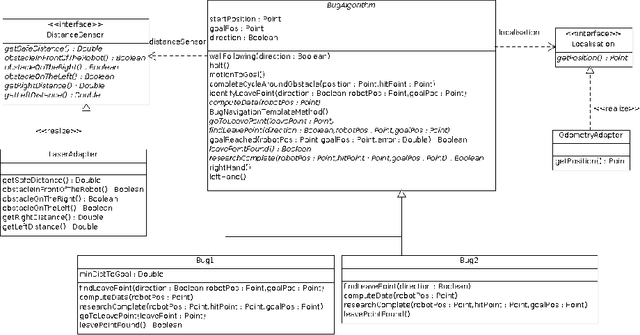
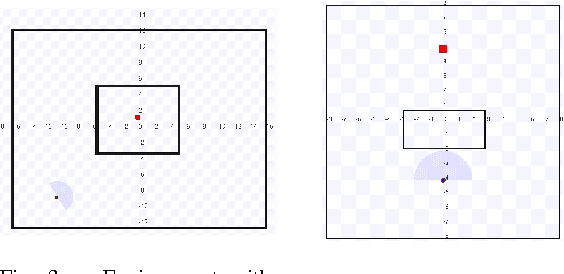
One of the defining features of the field of robotics is its breadth and heterogeneity. Unfortunately, despite the availability of several robotics middleware services, robotics software still fails to smoothly handle at least two kinds of variability: algorithmic variability and lower-level variability. The consequence is that implementations of algorithms are hard to understand and impacted by changes to lower-level details such as the choice or configuration of sensors or actuators. Moreover, when several algorithms or algorithmic variants are available it is difficult to compare and combine them. In order to alleviate these problems we propose a top-down approach to express and implement robotics algorithms and families of algorithms so that they are both less dependent on lower-level details and easier to understand and combine. This approach goes top-down from the algorithms and shields them from lower-level details by introducing very high level abstractions atop the intermediate abstractions of robotics middleware. This approach is illustrated on 7 variants of the Bug family that were implemented using both laser and infra-red sensors.
Representing, Simulating and Analysing Ho Chi Minh City Tsunami Plan by Means of Process Models
Dec 21, 2013
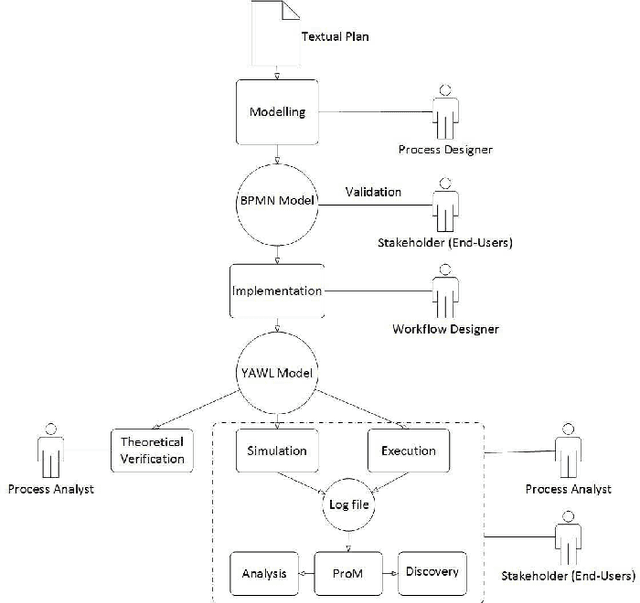


This paper considers the textual plan (guidelines) proposed by People's Committee of Ho Chi Minh City (Vietnam) to manage earthquake and tsunami, and try to represent it in a more formal way, in order to provide means to simulate, analyse and adapt it. We first present a state of the art about coordination models for disaster management with a focus on process oriented approaches. We give an overview of the different dimensions of the textual tsunami plan of Ho Chi Minh City and then the graphical representation of its process with BPMN (Business Process Model and Notation). We finally show how to exploit this process with workflow tools to simulate (YAWL tool) and analyse it (ProM tool).
Proceedings of the Fourth International Workshop on Domain-Specific Languages and Models for Robotic Systems
Dec 20, 2013The Fourth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'13) was held in conjunction with the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), November 2013 in Tokyo, Japan. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Proceedings of the Third International Workshop on Domain-Specific Languages and Models for Robotic Systems
Feb 20, 2013Proceedings of the Third International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'12), held at the 2012 International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2012), November 2012 in Tsukuba, Japan. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Architecture (MDA) for robotics. A domain-specific language (DSL) is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Models-driven architecture (MDA) offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Proceedings of the Second International Workshop on Domain-Specific Languages and Models for Robotic Systems
Dec 10, 2012Proceedings of the Second International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'11), held in conjunction with the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), September 2011 in San Francisco, USA. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language (DSL) is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Models offer a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems