 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Top-Down Approach to Managing Variability in Robotics Algorithms
Paper and Code
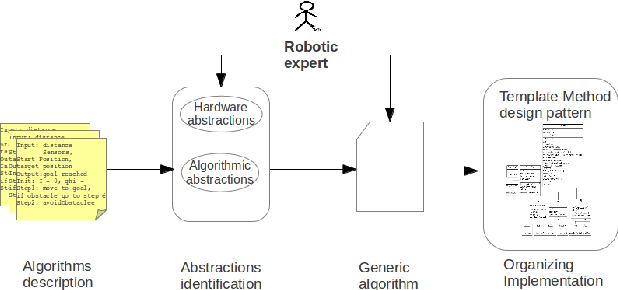
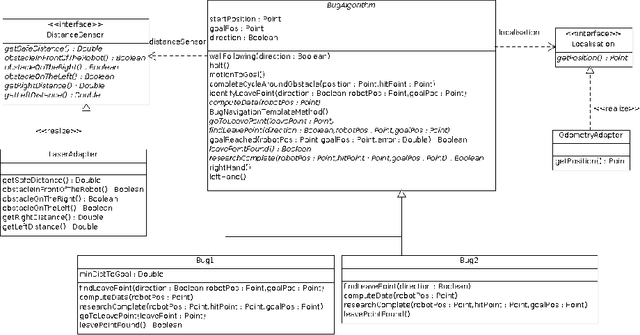
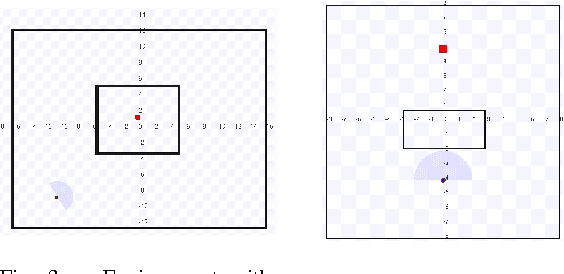
One of the defining features of the field of robotics is its breadth and heterogeneity. Unfortunately, despite the availability of several robotics middleware services, robotics software still fails to smoothly handle at least two kinds of variability: algorithmic variability and lower-level variability. The consequence is that implementations of algorithms are hard to understand and impacted by changes to lower-level details such as the choice or configuration of sensors or actuators. Moreover, when several algorithms or algorithmic variants are available it is difficult to compare and combine them. In order to alleviate these problems we propose a top-down approach to express and implement robotics algorithms and families of algorithms so that they are both less dependent on lower-level details and easier to understand and combine. This approach goes top-down from the algorithms and shields them from lower-level details by introducing very high level abstractions atop the intermediate abstractions of robotics middleware. This approach is illustrated on 7 variants of the Bug family that were implemented using both laser and infra-red sensors.