 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Top-Down Approach to Managing Variability in Robotics Algorithms
Dec 29, 2013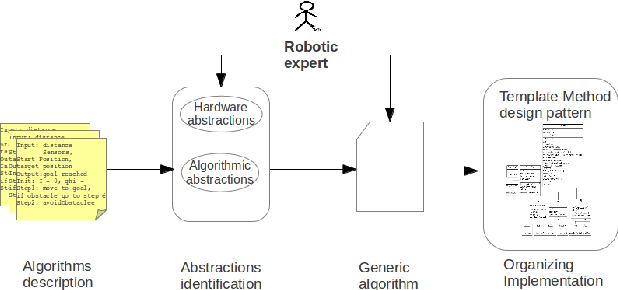
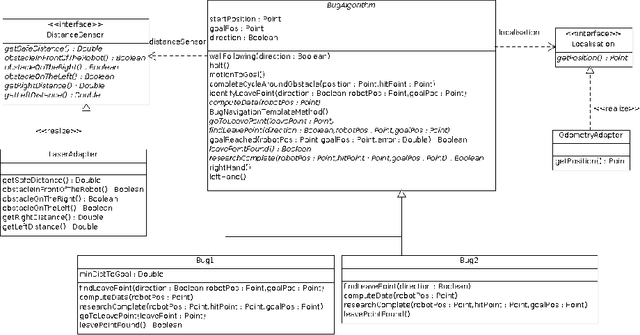
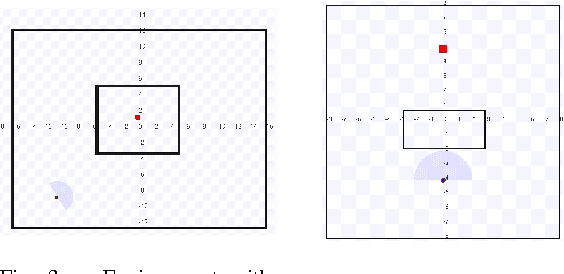
One of the defining features of the field of robotics is its breadth and heterogeneity. Unfortunately, despite the availability of several robotics middleware services, robotics software still fails to smoothly handle at least two kinds of variability: algorithmic variability and lower-level variability. The consequence is that implementations of algorithms are hard to understand and impacted by changes to lower-level details such as the choice or configuration of sensors or actuators. Moreover, when several algorithms or algorithmic variants are available it is difficult to compare and combine them. In order to alleviate these problems we propose a top-down approach to express and implement robotics algorithms and families of algorithms so that they are both less dependent on lower-level details and easier to understand and combine. This approach goes top-down from the algorithms and shields them from lower-level details by introducing very high level abstractions atop the intermediate abstractions of robotics middleware. This approach is illustrated on 7 variants of the Bug family that were implemented using both laser and infra-red sensors.
Proceedings of the first international workshop on domain-specific languages for robotic systems
Feb 22, 2011The First International Workshop on Domain-Specific Languages and models for ROBotic systems (DSLRob'10) was held at the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'10), October 2010 in Taipei, Taiwan. The main topics of the workshop were domain-specific languages and models. A domain-specific language (DSL) is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Models offer a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.