 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Quality of Service and Resource Aware Robotic Systems through Model-Driven Software Development
Sep 24, 2010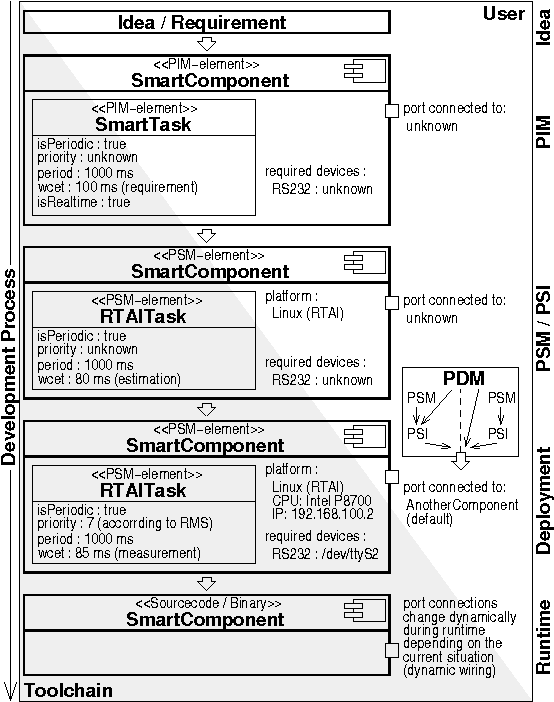

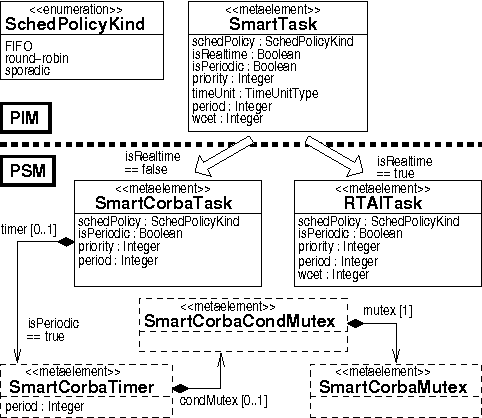
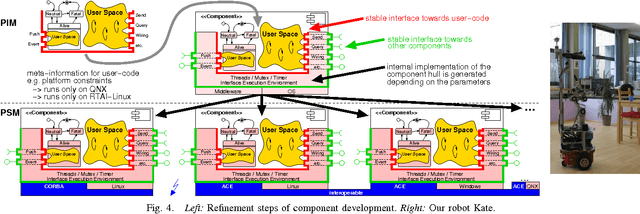
Engineering the software development process in robotics is one of the basic necessities towards industrial-strength service robotic systems. A major challenge is to make the step from code-driven to model-driven systems. This is essential to replace hand-crafted single-unit systems by systems composed out of components with explicitly stated properties. Furthermore, this fosters reuse by separating robotics knowledge from short-cycled implementational technologies. Altogether, this is one but important step towards "able" robots. This paper reports on a model-driven development process for robotic systems. The process consists of a robotics metamodel with first explications of non-functional properties. A model-driven toolchain based on Eclipse provides the model transformation and code generation steps. It also provides design time analysis of resource parameters (e.g. schedulability analysis of realtime tasks) as a first step towards overall resource awareness in the development of integrated robotic systems. The overall approach is underpinned by several real world scenarios.