 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Basins of Attraction: Evaluating Robustness of Natural Dynamics
Jun 21, 2018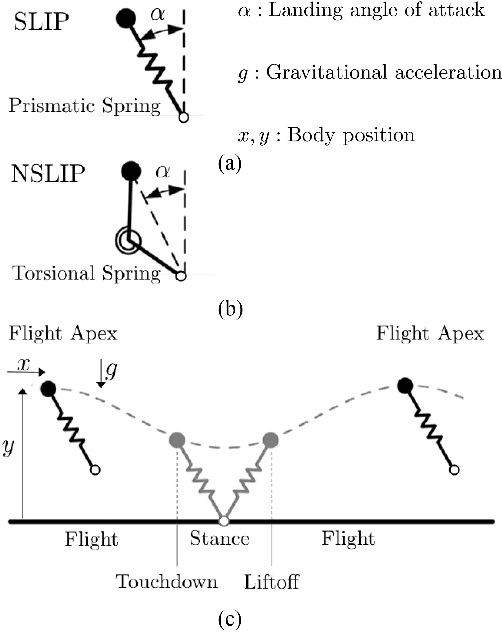



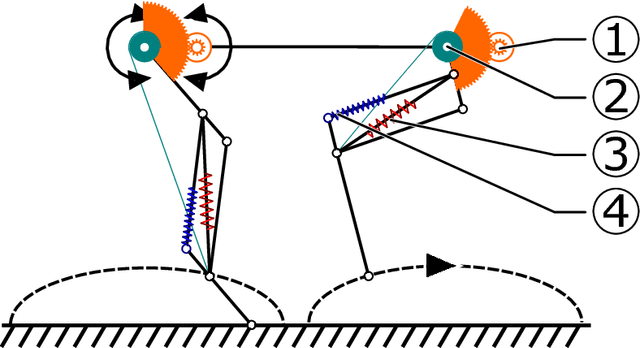
It is commonly accepted that properly designing a system to exhibit favorable natural dynamics can greatly simplify designing or learning the control policy. It is however still unclear what constitutes favorable natural dynamics, and how to quantify its effect. Most studies of simple walking and running models have focused on the basins of attraction of passive limit-cycles, and the notion of self-stability. We emphasize instead the importance of stepping beyond basins of attraction. We show an approach based on viability theory to quantify robustness, valid for the family of all robust control policies. This allows us to evaluate the robustness inherent to the natural dynamics before designing the control policy or specifying a control objective. We illustrate this approach on simple spring mass models of running and show previously unexplored advantages to using a nonlinear leg stiffness. We believe designing robots with robust natural dynamics is partic- ularly important for enabling learning control policies directly in hardware.
Learning from Outside the Viability Kernel: Why we Should Build Robots that can Fall with Grace
Jun 18, 2018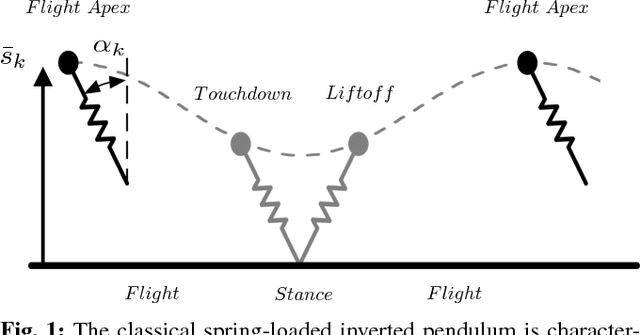
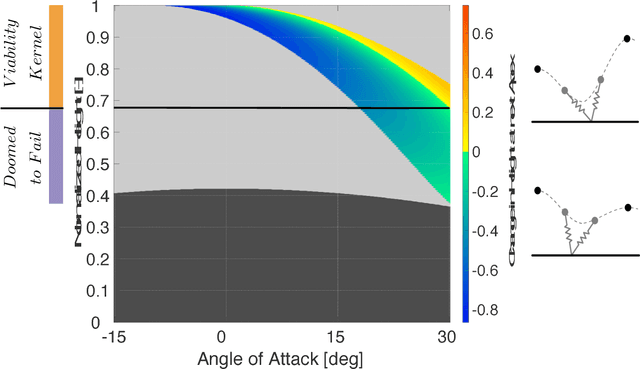
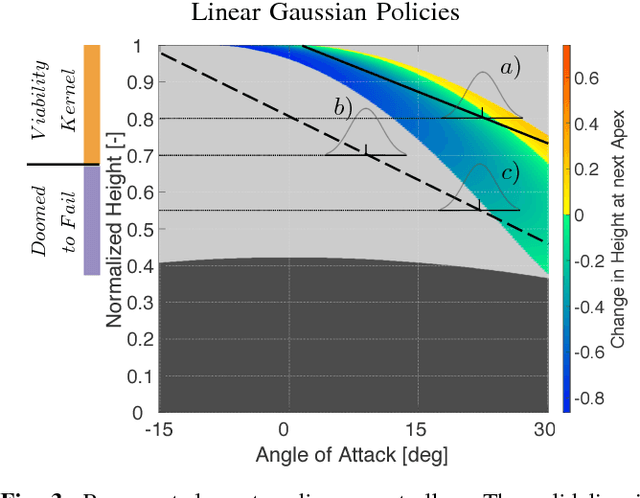
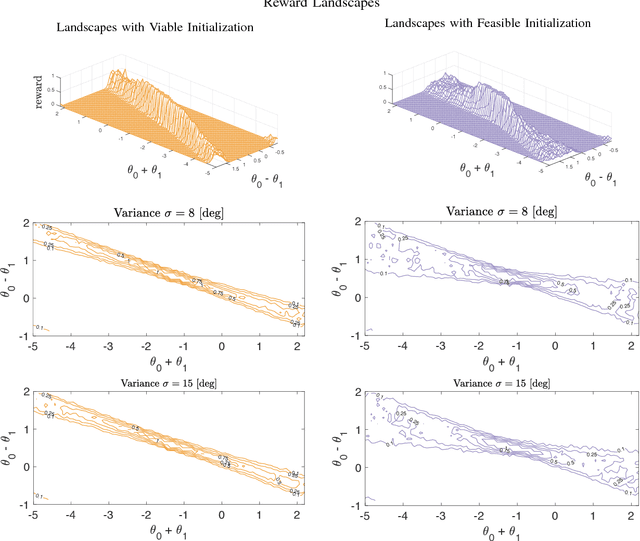
Despite impressive results using reinforcement learning to solve complex problems from scratch, in robotics this has still been largely limited to model-based learning with very informative reward functions. One of the major challenges is that the reward landscape often has large patches with no gradient, making it difficult to sample gradients effectively. We show here that the robot state-initialization can have a more important effect on the reward landscape than is generally expected. In particular, we show the counter-intuitive benefit of including initializations that are unviable, in other words initializing in states that are doomed to fail.
Oncilla robot: a versatile open-source quadruped research robot with compliant pantograph legs
Jun 16, 2018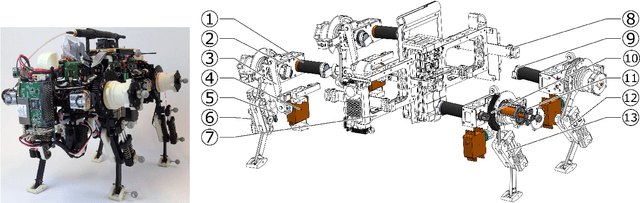
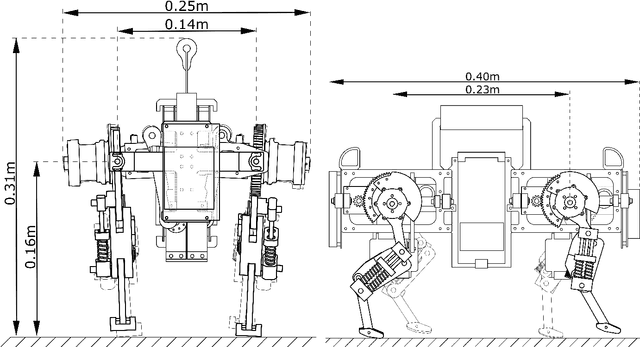
We present Oncilla robot, a novel mobile, quadruped legged locomotion machine. This large-cat sized, 5.1 robot is one of a kind of a recent, bioinspired legged robot class designed with the capability of model-free locomotion control. Animal legged locomotion in rough terrain is clearly shaped by sensor feedback systems. Results with Oncilla robot show that agile and versatile locomotion is possible without sensory signals to some extend, and tracking becomes robust when feedback control is added (Ajaoolleian 2015). By incorporating mechanical and control blueprints inspired from animals, and by observing the resulting robot locomotion characteristics, we aim to understand the contribution of individual components. Legged robots have a wide mechanical and control design parameter space, and a unique potential as research tools to investigate principles of biomechanics and legged locomotion control. But the hardware and controller design can be a steep initial hurdle for academic research. To facilitate the easy start and development of legged robots, Oncilla-robot's blueprints are available through open-source. [...]
Shaping in Practice: Training Wheels to Learn Fast Hopping Directly in Hardware
Mar 07, 2018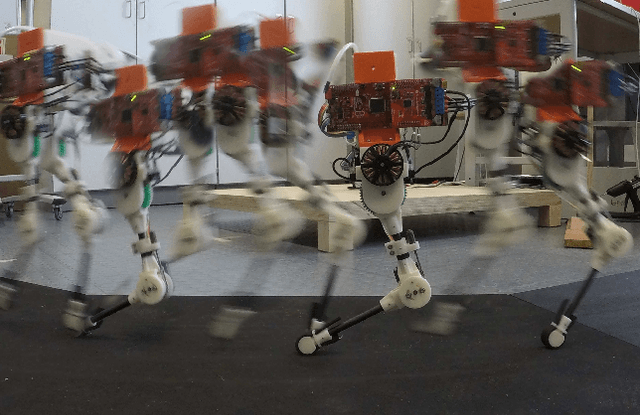
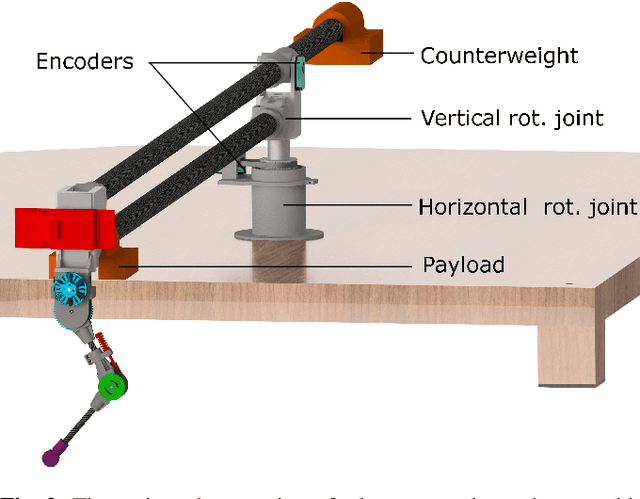
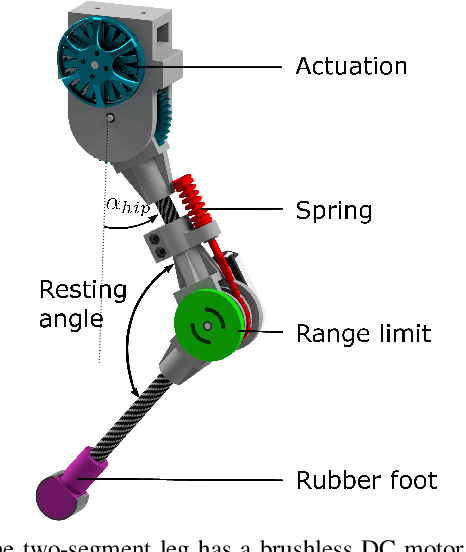
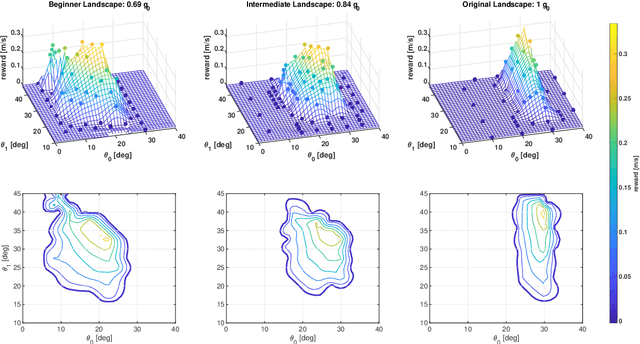
Learning instead of designing robot controllers can greatly reduce engineering effort required, while also emphasizing robustness. Despite considerable progress in simulation, applying learning directly in hardware is still challenging, in part due to the necessity to explore potentially unstable parameters. We explore the concept of shaping the reward landscape with training wheels: temporary modifications of the physical hardware that facilitate learning. We demonstrate the concept with a robot leg mounted on a boom learning to hop fast. This proof of concept embodies typical challenges such as instability and contact, while being simple enough to empirically map out and visualize the reward landscape. Based on our results we propose three criteria for designing effective training wheels for learning in robotics. A video synopsis can be found at https://youtu.be/6iH5E3LrYh8.