 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustry Best Practices in Robotics Software Engineering
Dec 09, 2022Robotics software is pushing the limits of software engineering practice. The 3rd International Workshop on Robotics Software Engineering held a panel on "the best practices for robotic software engineering". This article shares the key takeaways that emerged from the discussion among the panelists and the workshop, ranging from architecting practices at the NASA/Caltech Jet Propulsion Laboratory, model-driven development at Bosch, development and testing of autonomous driving systems at Waymo, and testing of robotics software at XITASO. Researchers and practitioners can build on the contents of this paper to gain a fresh perspective on their activities and focus on the most pressing practices and challenges in developing robotics software today.
Opportunities and Limitations of Mixed Reality Holograms in Industrial Robotics
Jan 22, 2020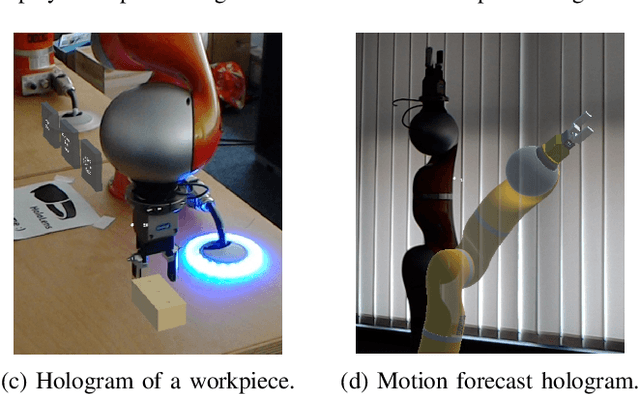
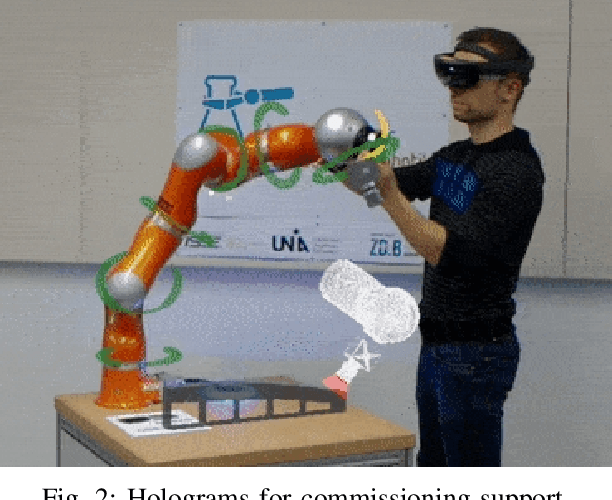
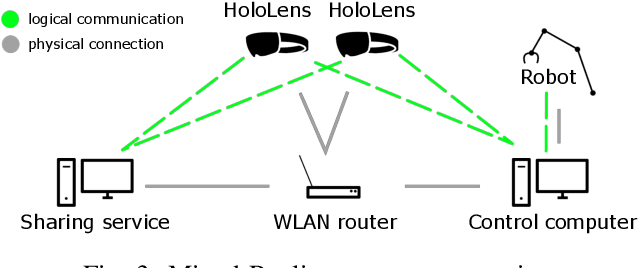
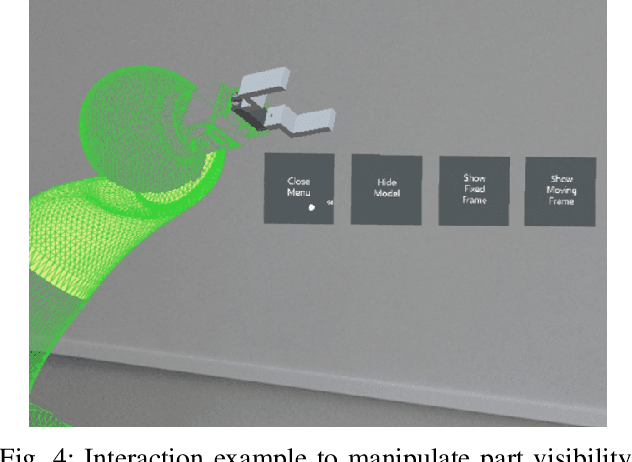
This paper introduces two case studies combining the field of industrial robotics with Mixed Reality (MR). The goal of those case studies is to get a better understanding of how MR can be useful and what are the limitations. The first case study describes an approach to visualize the digital twin of a robot arm. The second case study aims at facilitating the commissioning of industrial robots. Furthermore, this paper reports the experiences gained by implementing those two scenarios and discusses the limitations.
Towards a graphical language for quadrotor missions
Dec 05, 2014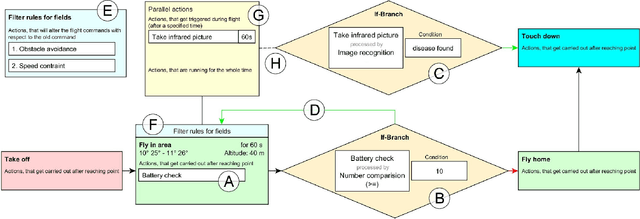
This paper presents an approach for defining Unmanned Aerial Vehicle (UAV) missions on a high level. Current methods for UAV mission specification are evaluated and their deficiencies are analyzed. From these findings, a new graphical specification language for UAV missions is proposed, which is targeted towards typical UAV users from various domains rather than computer science experts. The research is ongoing, but a first prototype is presented.
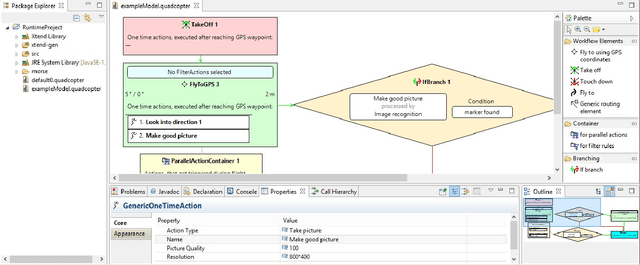
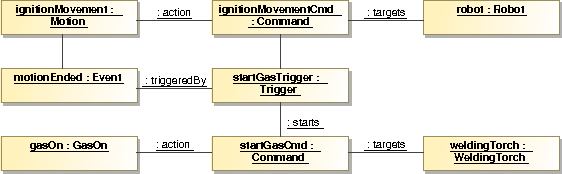
A Graphical Language for Real-Time Critical Robot Commands
Mar 27, 2013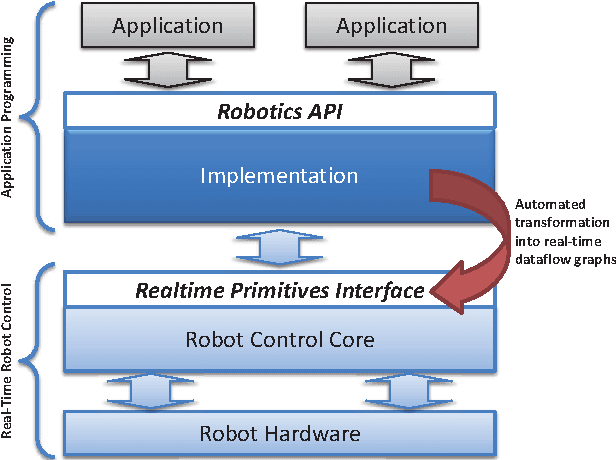
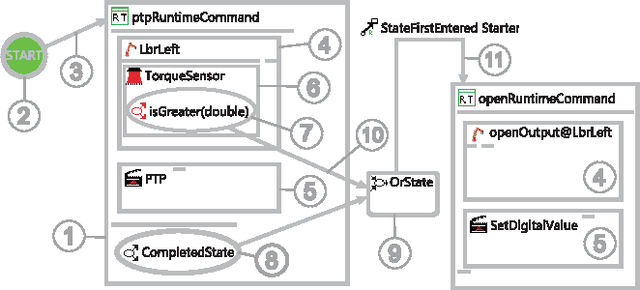

Industrial robotics is characterized by sophisticated mechanical components and highly-developed real-time control algorithms. However, the efficient use of robotic systems is very much limited by existing proprietary programming methods. In the research project SoftRobot, a software architecture was developed that enables the programming of complex real-time critical robot tasks with an object-oriented general purpose language. On top of this architecture, a graphical language was developed to ease the specification of complex robot commands, which can then be used as part of robot application workflows. This paper gives an overview about the design and implementation of this graphical language and illustrates its usefulness with some examples.
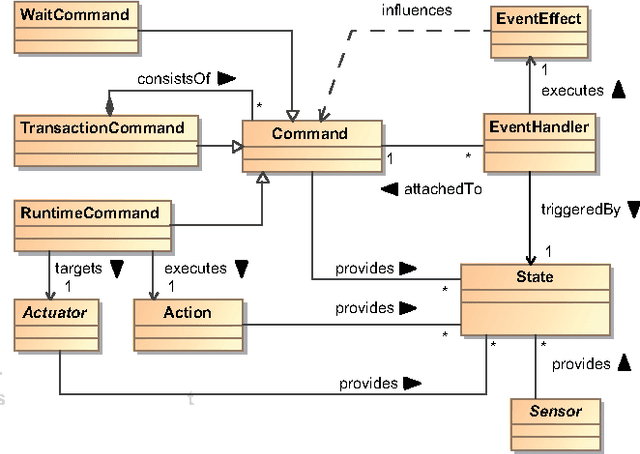
On reverse-engineering the KUKA Robot Language
Sep 25, 2010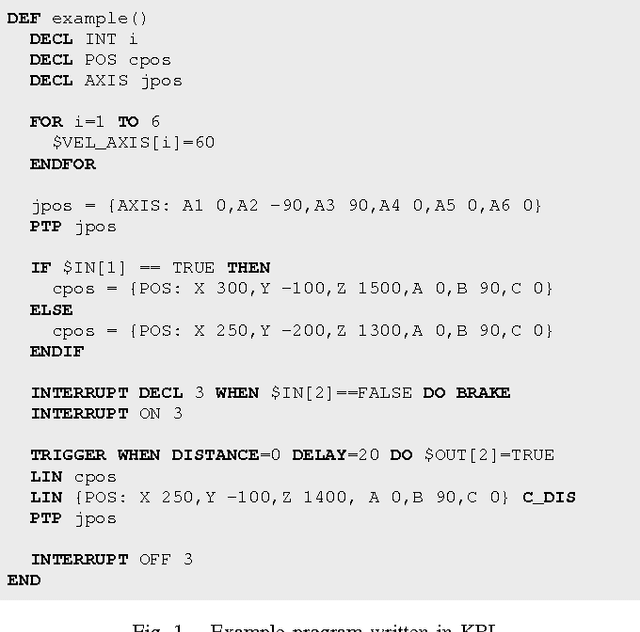
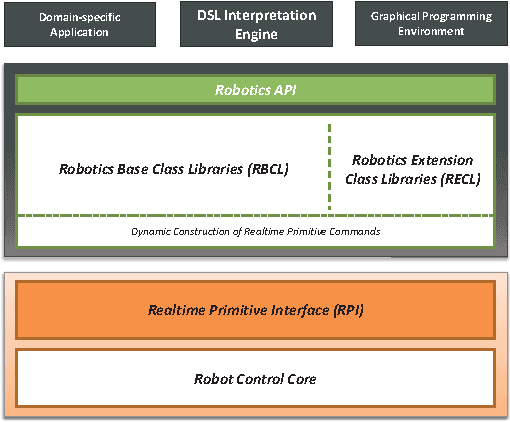
Most commercial manufacturers of industrial robots require their robots to be programmed in a proprietary language tailored to the domain - a typical domain-specific language (DSL). However, these languages oftentimes suffer from shortcomings such as controller-specific design, limited expressiveness and a lack of extensibility. For that reason, we developed the extensible Robotics API for programming industrial robots on top of a general-purpose language. Although being a very flexible approach to programming industrial robots, a fully-fledged language can be too complex for simple tasks. Additionally, legacy support for code written in the original DSL has to be maintained. For these reasons, we present a lightweight implementation of a typical robotic DSL, the KUKA Robot Language (KRL), on top of our Robotics API. This work deals with the challenges in reverse-engineering the language and mapping its specifics to the Robotics API. We introduce two different approaches of interpreting and executing KRL programs: tree-based and bytecode-based interpretation.