 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReward Prediction Error Prioritisation in Experience Replay: The RPE-PER Method
Jan 30, 2025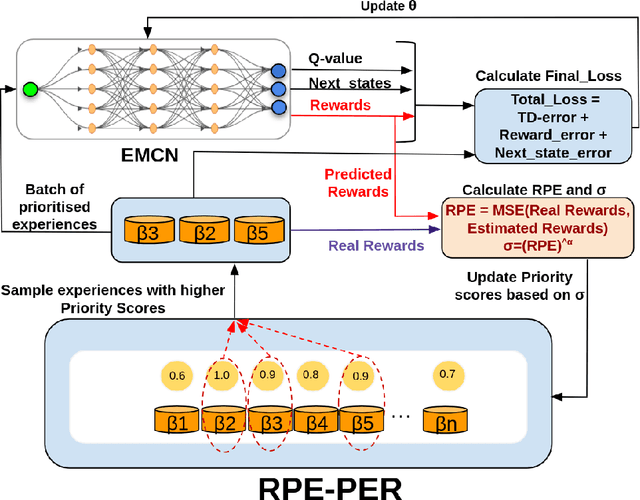
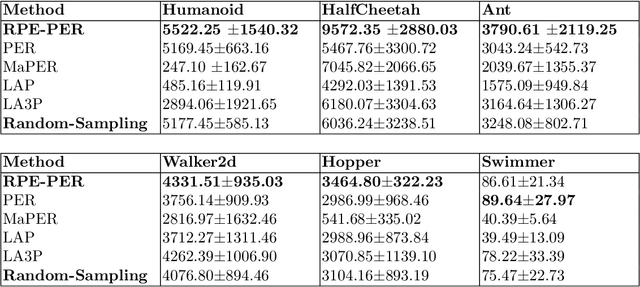
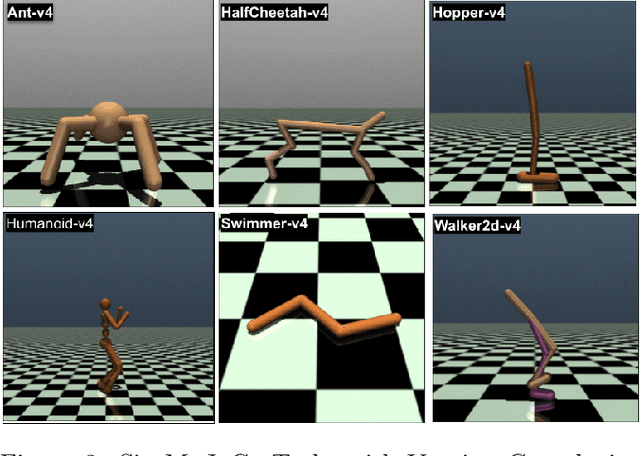
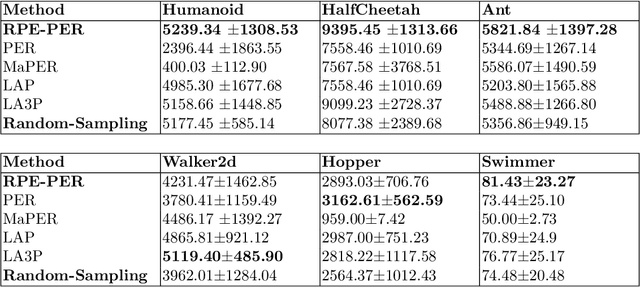
Reinforcement Learning algorithms aim to learn optimal control strategies through iterative interactions with an environment. A critical element in this process is the experience replay buffer, which stores past experiences, allowing the algorithm to learn from a diverse range of interactions rather than just the most recent ones. This buffer is especially essential in dynamic environments with limited experiences. However, efficiently selecting high-value experiences to accelerate training remains a challenge. Drawing inspiration from the role of reward prediction errors (RPEs) in biological systems, where they are essential for adaptive behaviour and learning, we introduce Reward Predictive Error Prioritised Experience Replay (RPE-PER). This novel approach prioritises experiences in the buffer based on RPEs. Our method employs a critic network, EMCN, that predicts rewards in addition to the Q-values produced by standard critic networks. The discrepancy between these predicted and actual rewards is computed as RPE and utilised as a signal for experience prioritisation. Experimental evaluations across various continuous control tasks demonstrate RPE-PER's effectiveness in enhancing the learning speed and performance of off-policy actor-critic algorithms compared to baseline approaches.
Image-Based Deep Reinforcement Learning with Intrinsically Motivated Stimuli: On the Execution of Complex Robotic Tasks
Jul 31, 2024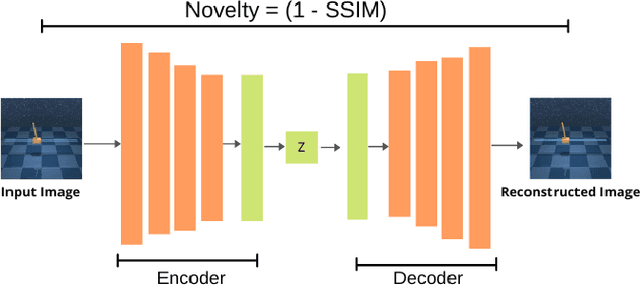
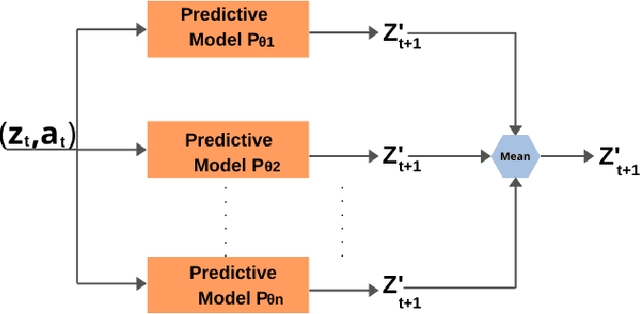
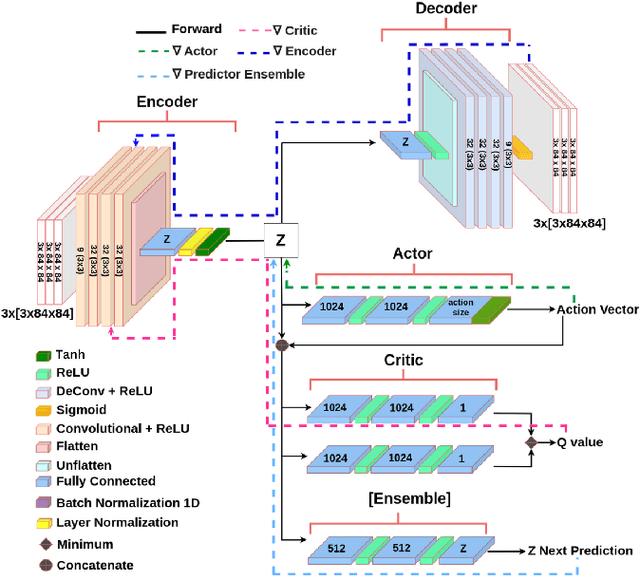
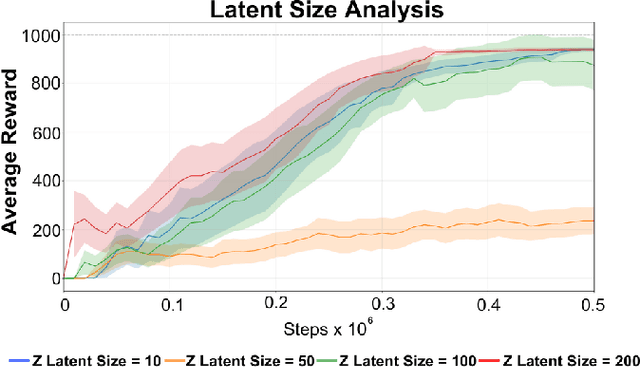
Reinforcement Learning (RL) has been widely used to solve tasks where the environment consistently provides a dense reward value. However, in real-world scenarios, rewards can often be poorly defined or sparse. Auxiliary signals are indispensable for discovering efficient exploration strategies and aiding the learning process. In this work, inspired by intrinsic motivation theory, we postulate that the intrinsic stimuli of novelty and surprise can assist in improving exploration in complex, sparsely rewarded environments. We introduce a novel sample-efficient method able to learn directly from pixels, an image-based extension of TD3 with an autoencoder called \textit{NaSA-TD3}. The experiments demonstrate that NaSA-TD3 is easy to train and an efficient method for tackling complex continuous-control robotic tasks, both in simulated environments and real-world settings. NaSA-TD3 outperforms existing state-of-the-art RL image-based methods in terms of final performance without requiring pre-trained models or human demonstrations.
Visual based Tomato Size Measurement System for an Indoor Farming Environment
Apr 12, 2023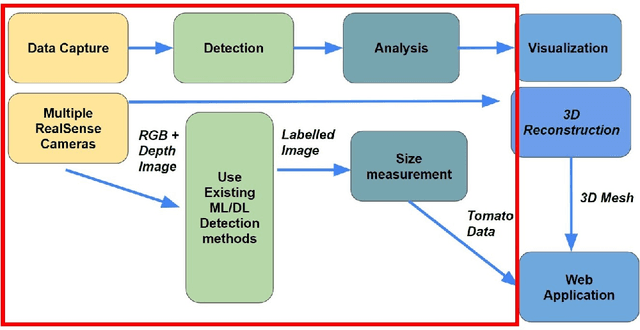
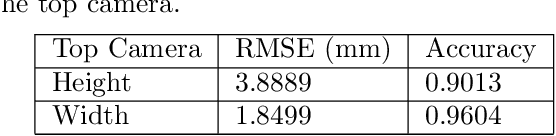
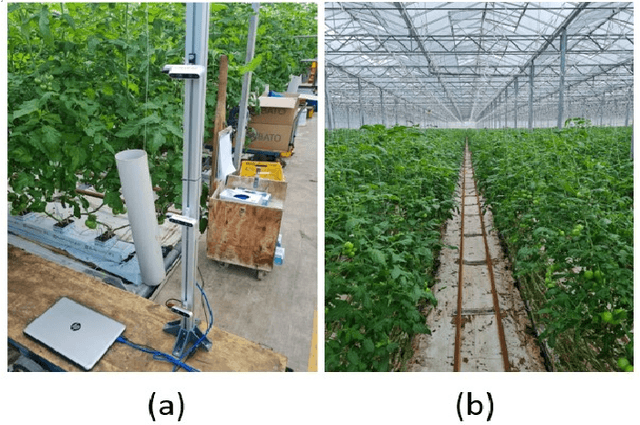
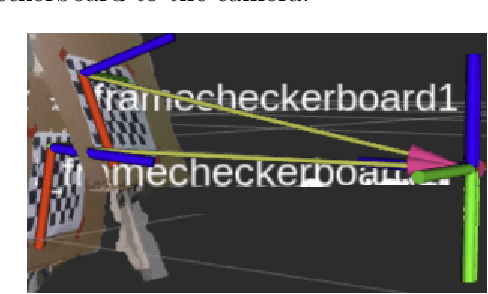
As technology progresses, smart automated systems will serve an increasingly important role in the agricultural industry. Current existing vision systems for yield estimation face difficulties in occlusion and scalability as they utilize a camera system that is large and expensive, which are unsuitable for orchard environments. To overcome these problems, this paper presents a size measurement method combining a machine learning model and depth images captured from three low cost RGBD cameras to detect and measure the height and width of tomatoes. The performance of the presented system is evaluated on a lab environment with real tomato fruits and fake leaves to simulate occlusion in the real farm environment. To improve accuracy by addressing fruit occlusion, our three-camera system was able to achieve a height measurement accuracy of 0.9114 and a width accuracy of 0.9443.
Look how they have grown: Non-destructive Leaf Detection and Size Estimation of Tomato Plants for 3D Growth Monitoring
Apr 07, 2023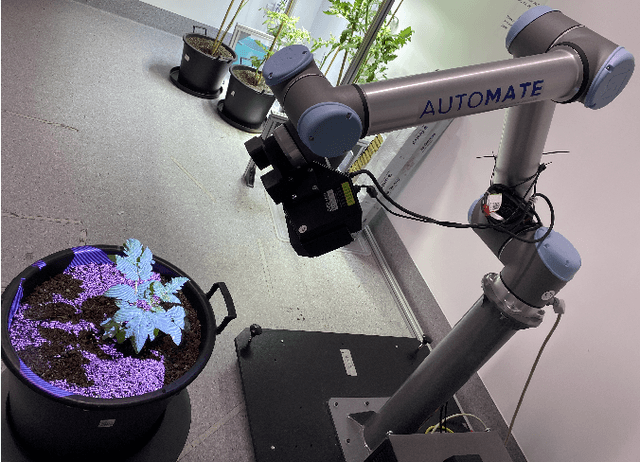
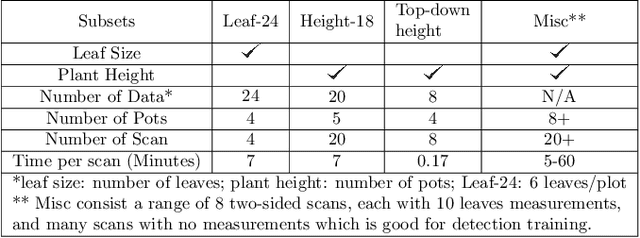
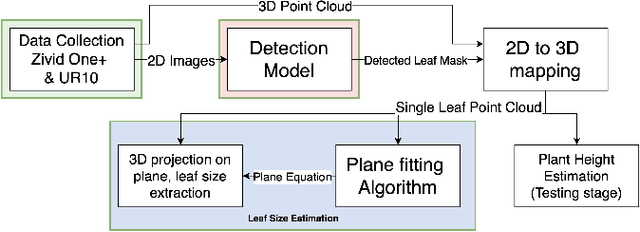
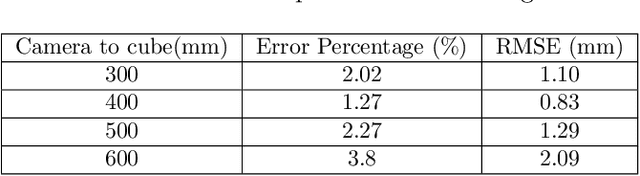
Smart farming is a growing field as technology advances. Plant characteristics are crucial indicators for monitoring plant growth. Research has been done to estimate characteristics like leaf area index, leaf disease, and plant height. However, few methods have been applied to non-destructive measurements of leaf size. In this paper, an automated non-destructive imaged-based measuring system is presented, which uses 2D and 3D data obtained using a Zivid 3D camera, creating 3D virtual representations (digital twins) of the tomato plants. Leaves are detected from corresponding 2D RGB images and mapped to their 3D point cloud using the detected leaf masks, which then pass the leaf point cloud to the plane fitting algorithm to extract the leaf size to provide data for growth monitoring. The performance of the measurement platform has been measured through a comprehensive trial on real-world tomato plants with quantified performance metrics compared to ground truth measurements. Three tomato leaf and height datasets (including 50+ 3D point cloud files of tomato plants) were collected and open-sourced in this project. The proposed leaf size estimation method demonstrates an RMSE value of 4.47mm and an R^2 value of 0.87. The overall measurement system (leaf detection and size estimation algorithms combine) delivers an RMSE value of 8.13mm and an R^2 value of 0.899.
* 10 Pages, 10 Figures
Deep Neural Network Based Real-time Kiwi Fruit Flower Detection in an Orchard Environment
Jun 08, 2020
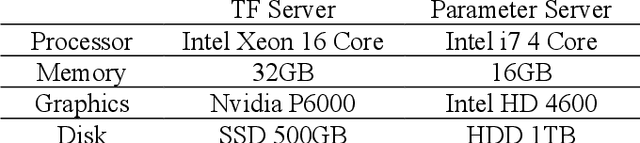
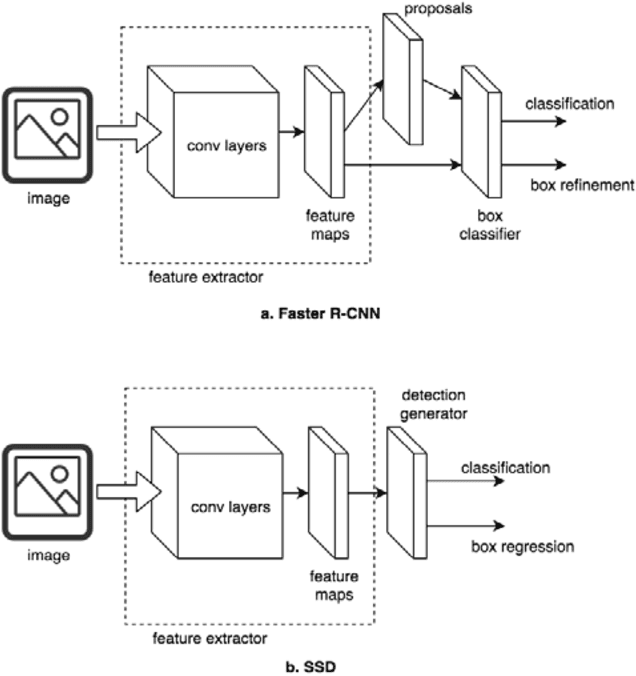
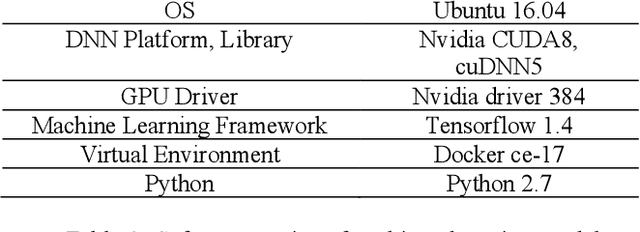
In this paper, we present a novel approach to kiwi fruit flower detection using Deep Neural Networks (DNNs) to build an accurate, fast, and robust autonomous pollination robot system. Recent work in deep neural networks has shown outstanding performance on object detection tasks in many areas. Inspired this, we aim for exploiting DNNs for kiwi fruit flower detection and present intensive experiments and their analysis on two state-of-the-art object detectors; Faster R-CNN and Single Shot Detector (SSD) Net, and feature extractors; Inception Net V2 and NAS Net with real-world orchard datasets. We also compare those approaches to find an optimal model which is suitable for a real-time agricultural pollination robot system in terms of accuracy and processing speed. We perform experiments with dataset collected from different seasons and locations (spatio-temporal consistency) in order to demonstrate the performance of the generalized model. The proposed system demonstrates promising results of 0.919, 0.874, and 0.889 for precision, recall, and F1-score respectively on our real-world dataset, and the performance satisfies the requirement for deploying the system onto an autonomous pollination robotics system.
Towards a graphical language for quadrotor missions
Dec 05, 2014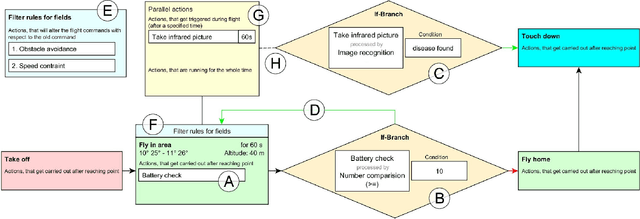
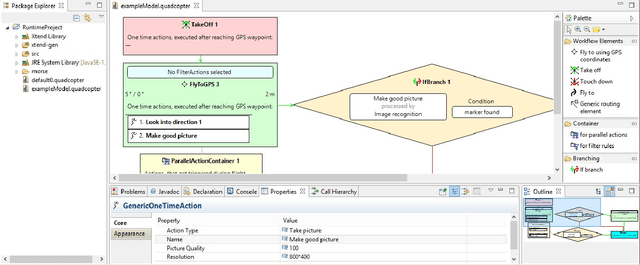
This paper presents an approach for defining Unmanned Aerial Vehicle (UAV) missions on a high level. Current methods for UAV mission specification are evaluated and their deficiencies are analyzed. From these findings, a new graphical specification language for UAV missions is proposed, which is targeted towards typical UAV users from various domains rather than computer science experts. The research is ongoing, but a first prototype is presented.