 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Graphical Language for Real-Time Critical Robot Commands
Paper and Code
Mar 27, 2013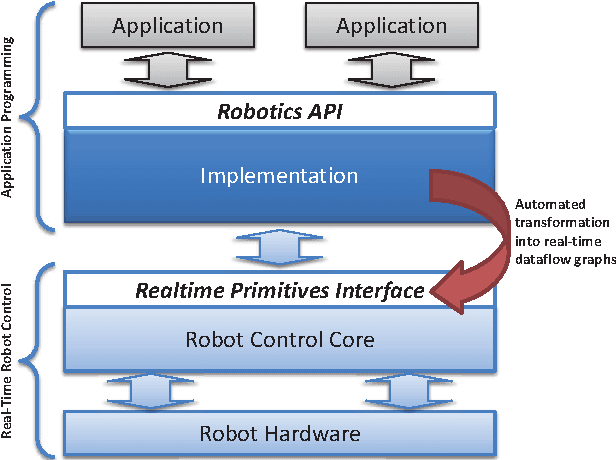
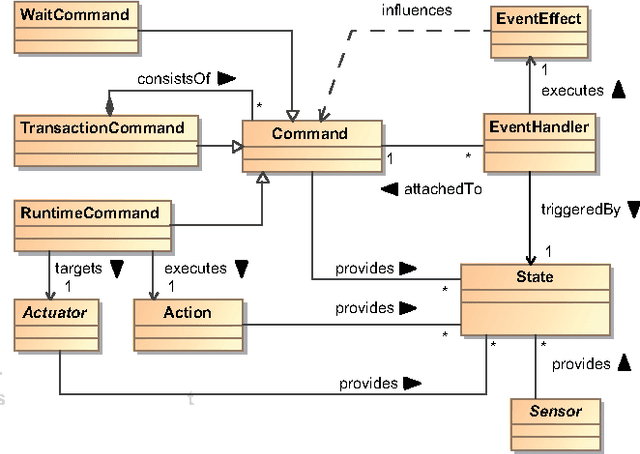
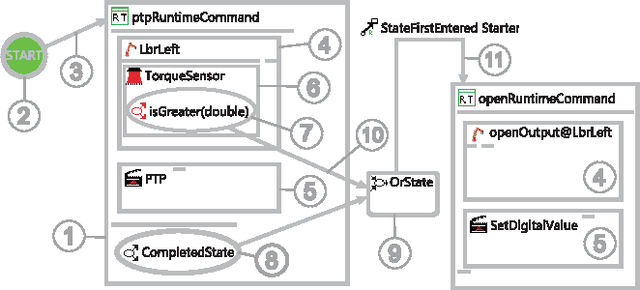

Industrial robotics is characterized by sophisticated mechanical components and highly-developed real-time control algorithms. However, the efficient use of robotic systems is very much limited by existing proprietary programming methods. In the research project SoftRobot, a software architecture was developed that enables the programming of complex real-time critical robot tasks with an object-oriented general purpose language. On top of this architecture, a graphical language was developed to ease the specification of complex robot commands, which can then be used as part of robot application workflows. This paper gives an overview about the design and implementation of this graphical language and illustrates its usefulness with some examples.