 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustrial Semantics-Aware Digital Twins: A Hybrid Graph Matching Approach for Asset Administration Shells
Jan 10, 2026Although the Asset Administration Shell (AAS) standard provides a structured and machine-readable representation of industrial assets, their semantic comparability remains a major challenge, particularly when different vocabularies and modeling practices are used. Engineering would benefit from retrieving existing AAS models that are similar to the target in order to reuse submodels, parameters, and metadata. In practice, however, heterogeneous vocabularies and divergent modeling conventions hinder automated, content-level comparison across AAS. This paper proposes a hybrid graph matching approach to enable semantics-aware comparison of Digital Twin representations. The method combines rule-based pre-filtering using SPARQL with embedding-based similarity calculation leveraging RDF2vec to capture both structural and semantic relationships between AAS models. This contribution provides a foundation for enhanced discovery, reuse, and automated configuration in Digital Twin networks.
Industry Best Practices in Robotics Software Engineering
Dec 09, 2022Robotics software is pushing the limits of software engineering practice. The 3rd International Workshop on Robotics Software Engineering held a panel on "the best practices for robotic software engineering". This article shares the key takeaways that emerged from the discussion among the panelists and the workshop, ranging from architecting practices at the NASA/Caltech Jet Propulsion Laboratory, model-driven development at Bosch, development and testing of autonomous driving systems at Waymo, and testing of robotics software at XITASO. Researchers and practitioners can build on the contents of this paper to gain a fresh perspective on their activities and focus on the most pressing practices and challenges in developing robotics software today.
Towards Self-Explainable Cyber-Physical Systems
Aug 13, 2019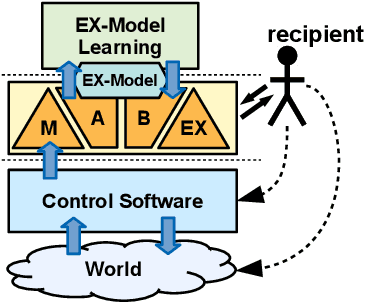
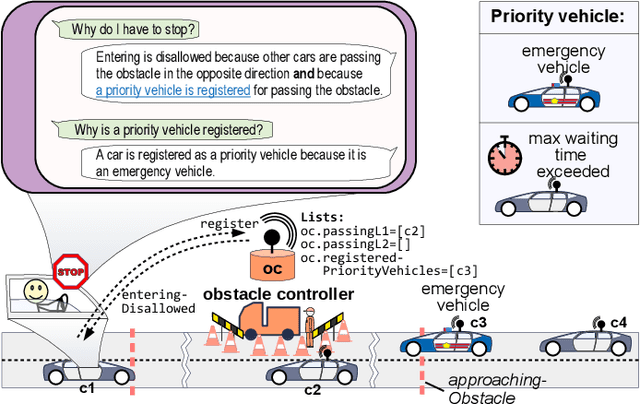
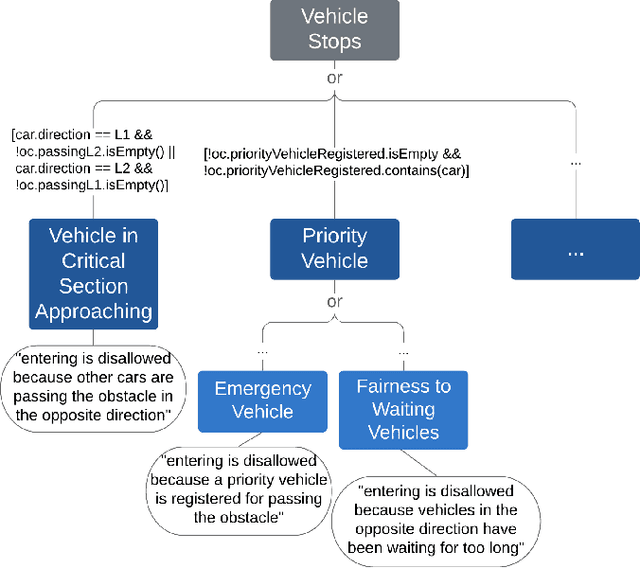
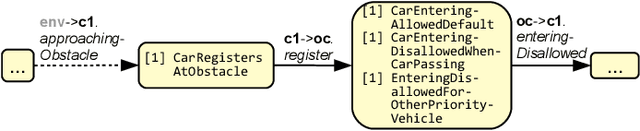
With the increasing complexity of CPSs, their behavior and decisions become increasingly difficult to understand and comprehend for users and other stakeholders. Our vision is to build self-explainable systems that can, at run-time, answer questions about the system's past, current, and future behavior. As hitherto no design methodology or reference framework exists for building such systems, we propose the MAB-EX framework for building self-explainable systems that leverage requirements- and explainability models at run-time. The basic idea of MAB-EX is to first Monitor and Analyze a certain behavior of a system, then Build an explanation from explanation models and convey this EXplanation in a suitable way to a stakeholder. We also take into account that new explanations can be learned, by updating the explanation models, should new and yet un-explainable behavior be detected by the system.
A New Skill Based Robot Programming Language Using UML/P Statecharts
Sep 22, 2014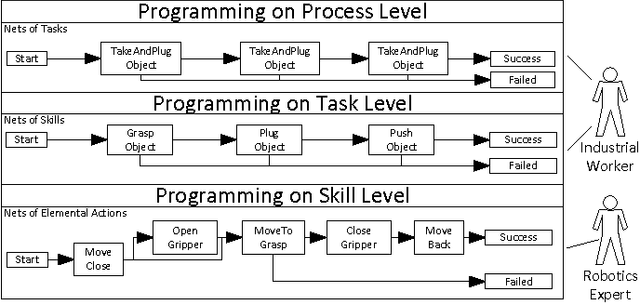
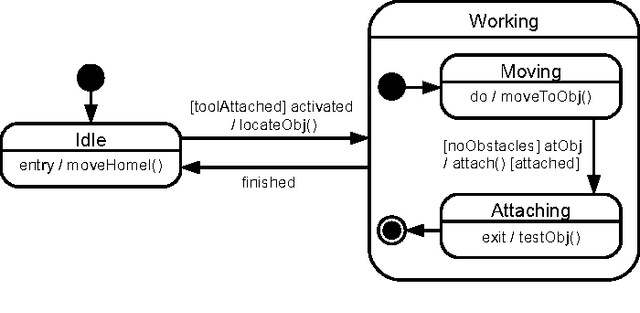
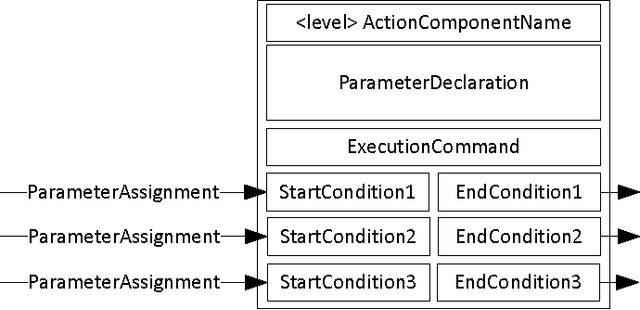
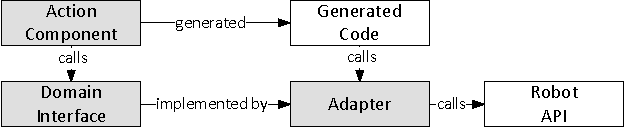
This paper introduces the new robot programming language LightRocks (Light Weight Robot Coding for Skills), a domain specific language (DSL) for robot programming. The language offers three different level of abstraction for robot programming. On lowest level skills are coded by domain experts. On a more abstract level these skills are supposed to be combined by shop floor workers or technicians to define tasks. The language is designed to allow as much flexibility as necessary on the lowest level of abstraction and is kept as simple as possible with the more abstract layers. A Statechart like model is used to describe the different levels of detail. For this we apply the UML/P and the language workbench MontiCore. To this end we are able to generate code while hiding controller specific implementation details. In addition the development in LightRocks is supported by a generic graphical editor implemented as an Eclipse plugin.
Black-box Integration of Heterogeneous Modeling Languages for Cyber-Physical Systems
Sep 08, 2014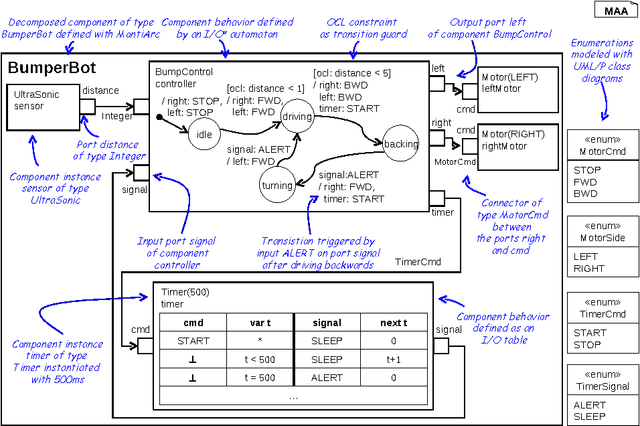
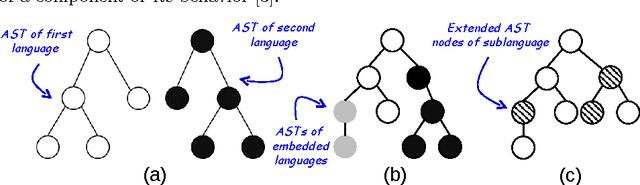
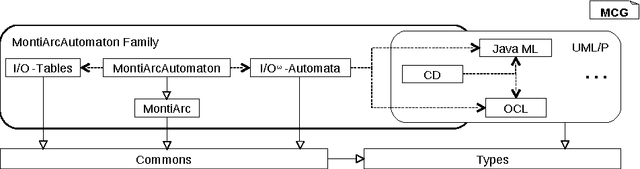
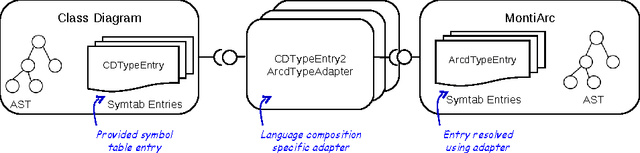
Robots belong to a class of Cyber-Physical Systems where complex software as a mobile device has to full tasks in a complex environment. Modeling robotics applications for analysis and code generation requires modeling languages for the logical software architecture and the system behavior. The MontiArcAutomaton modeling framework integrates six independently developed modeling languages to model robotics applications: a component & connector architecture description language, automata, I/O tables, class diagrams, OCL, and a Java DSL. We describe how we integrated these languages into MontiArcAutomaton a-posteriori in a black-box integration fashion.