 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParamater Optimization for Manipulator Motion Planning using a Novel Benchmark Set
Feb 28, 2023



Sampling-based motion planning algorithms have been continuously developed for more than two decades. Apart from mobile robots, they are also widely used in manipulator motion planning. Hence, these methods play a key role in collaborative and shared workspaces. Despite numerous improvements, their performance can highly vary depending on the chosen parameter setting. The optimal parameters depend on numerous factors such as the start state, the goal state and the complexity of the environment. Practitioners usually choose these values using their experience and tedious trial and error experiments. To address this problem, recent works combine hyperparameter optimization methods with motion planning. They show that tuning the planner's parameters can lead to shorter planning times and lower costs. It is not clear, however, how well such approaches generalize to a diverse set of planning problems that include narrow passages as well as barely cluttered environments. In this work, we analyze optimized planner settings for a large set of diverse planning problems. We then provide insights into the connection between the characteristics of the planning problem and the optimal parameters. As a result, we provide a list of recommended parameters for various use-cases. Our experiments are based on a novel motion planning benchmark for manipulators which we provide at https://mytuc.org/rybj.
A New Skill Based Robot Programming Language Using UML/P Statecharts
Sep 22, 2014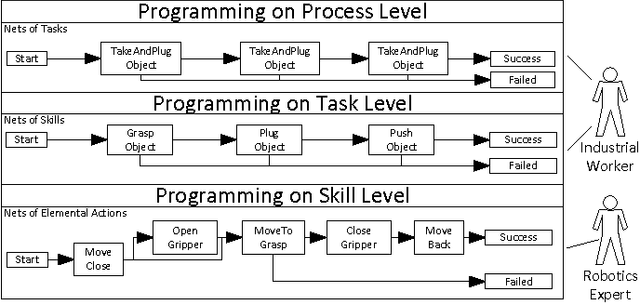
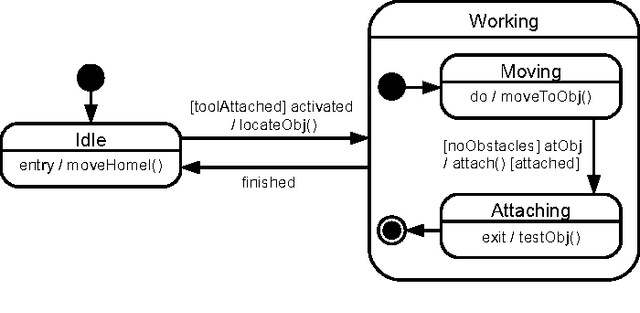
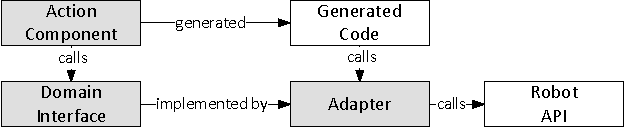
This paper introduces the new robot programming language LightRocks (Light Weight Robot Coding for Skills), a domain specific language (DSL) for robot programming. The language offers three different level of abstraction for robot programming. On lowest level skills are coded by domain experts. On a more abstract level these skills are supposed to be combined by shop floor workers or technicians to define tasks. The language is designed to allow as much flexibility as necessary on the lowest level of abstraction and is kept as simple as possible with the more abstract layers. A Statechart like model is used to describe the different levels of detail. For this we apply the UML/P and the language workbench MontiCore. To this end we are able to generate code while hiding controller specific implementation details. In addition the development in LightRocks is supported by a generic graphical editor implemented as an Eclipse plugin.