 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Grammar Masking to Ensure Syntactic Validity in LLM-based Modeling Tasks
Jul 09, 2024



We present and evaluate a method called grammar masking, which is used to guide large language models (LLMs) toward producing syntactically correct models for a given context-free grammar. Prompt engineering methods such as few-shot learning or priming can be used to improve the chances of an LLM producing correct syntax, but the more complex the grammar, the more time-consuming and less promising these methods become. Previous work is focused primarily on the usage of either language model training or prompt engineering. In this work, a method is presented that restricts the output to a given grammar using constrained decoding to ensure the output adheres to a valid syntax. We use several DSLs built with MontiCore and task multiple LLMs to produce models with and without constrained decoding. A corresponding parser is used to confirm the syntactic correctness of each model. We show that grammar masking can dramatically improve the modeling capabilities of several LLMs, reducing the need for well-refined prompting while increasing the chance of producing correct models.
Technical Report on Neural Language Models and Few-Shot Learning for Systematic Requirements Processing in MDSE
Nov 16, 2022



Systems engineering, in particular in the automotive domain, needs to cope with the massively increasing numbers of requirements that arise during the development process. To guarantee a high product quality and make sure that functional safety standards such as ISO26262 are fulfilled, the exploitation of potentials of model-driven systems engineering in the form of automatic analyses, consistency checks, and tracing mechanisms is indispensable. However, the language in which requirements are written, and the tools needed to operate on them, are highly individual and require domain-specific tailoring. This hinders automated processing of requirements as well as the linking of requirements to models. Introducing formal requirement notations in existing projects leads to the challenge of translating masses of requirements and process changes on the one hand and to the necessity of the corresponding training for the requirements engineers. In this paper, based on the analysis of an open-source set of automotive requirements, we derive domain-specific language constructs helping us to avoid ambiguities in requirements and increase the level of formality. The main contribution is the adoption and evaluation of few-shot learning with large pretrained language models for the automated translation of informal requirements to structured languages such as a requirement DSL. We show that support sets of less than ten translation examples can suffice to few-shot train a language model to incorporate keywords and implement syntactic rules into informal natural language requirements.
MDE for Machine Learning-Enabled Software Systems: A Case Study and Comparison of MontiAnna & ML-Quadrat
Sep 15, 2022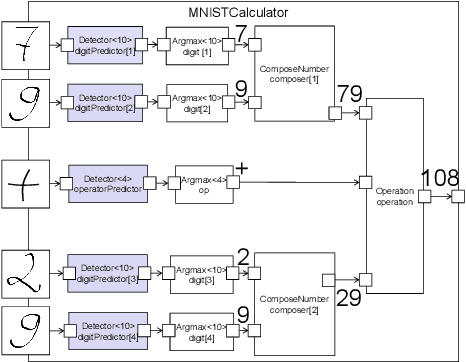
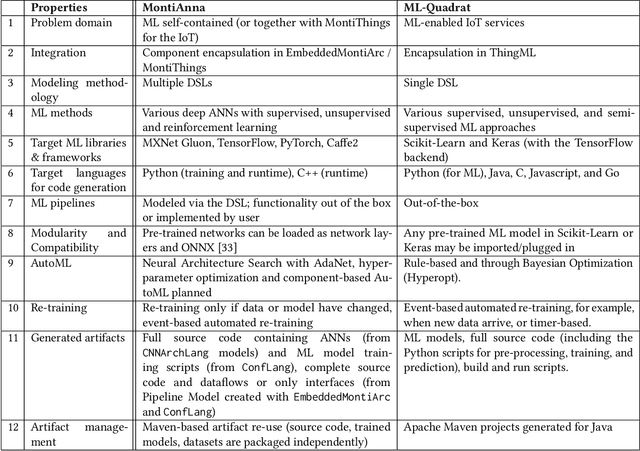
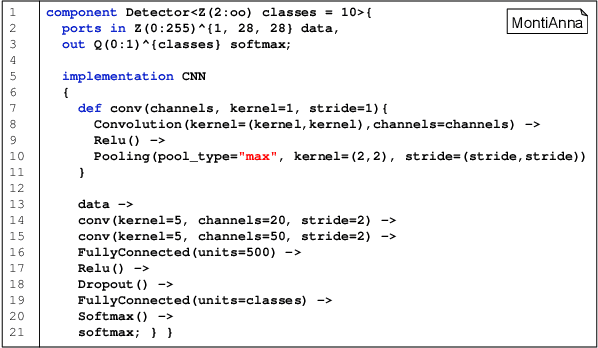
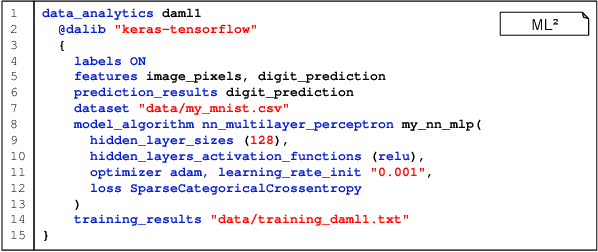
In this paper, we propose to adopt the MDE paradigm for the development of Machine Learning (ML)-enabled software systems with a focus on the Internet of Things (IoT) domain. We illustrate how two state-of-the-art open-source modeling tools, namely MontiAnna and ML-Quadrat can be used for this purpose as demonstrated through a case study. The case study illustrates using ML, in particular deep Artificial Neural Networks (ANNs), for automated image recognition of handwritten digits using the MNIST reference dataset, and integrating the machine learning components into an IoT system. Subsequently, we conduct a functional comparison of the two frameworks, setting out an analysis base to include a broad range of design considerations, such as the problem domain, methods for the ML integration into larger systems, and supported ML methods, as well as topics of recent intense interest to the ML community, such as AutoML and MLOps. Accordingly, this paper is focused on elucidating the potential of the MDE approach in the ML domain. This supports the ML engineer in developing the (ML/software) model rather than implementing the code, and additionally enforces reusability and modularity of the design through enabling the out-of-the-box integration of ML functionality as a component of the IoT or cyber-physical systems.
A New Skill Based Robot Programming Language Using UML/P Statecharts
Sep 22, 2014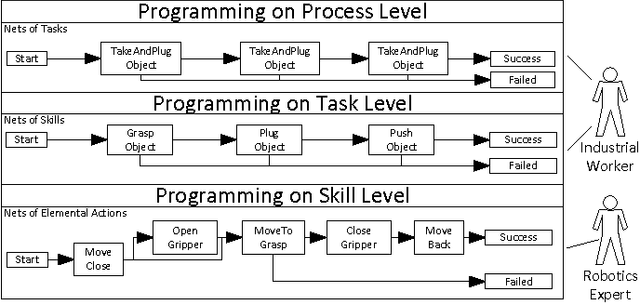
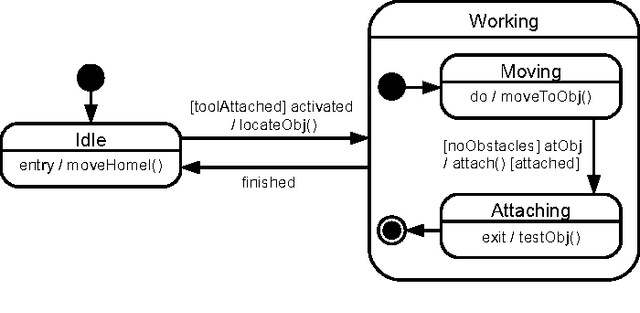
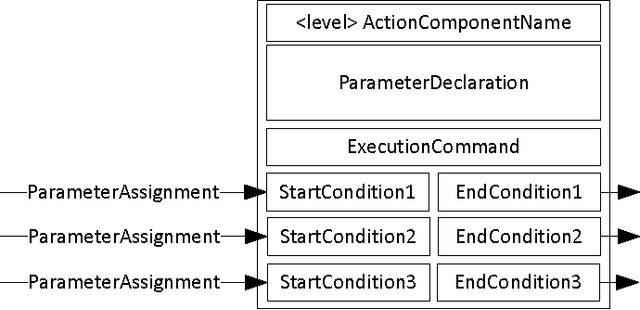
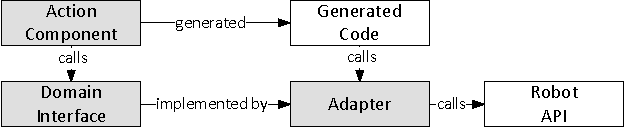
This paper introduces the new robot programming language LightRocks (Light Weight Robot Coding for Skills), a domain specific language (DSL) for robot programming. The language offers three different level of abstraction for robot programming. On lowest level skills are coded by domain experts. On a more abstract level these skills are supposed to be combined by shop floor workers or technicians to define tasks. The language is designed to allow as much flexibility as necessary on the lowest level of abstraction and is kept as simple as possible with the more abstract layers. A Statechart like model is used to describe the different levels of detail. For this we apply the UML/P and the language workbench MontiCore. To this end we are able to generate code while hiding controller specific implementation details. In addition the development in LightRocks is supported by a generic graphical editor implemented as an Eclipse plugin.
Caroline: An Autonomously Driving Vehicle for Urban Environments
Sep 22, 2014
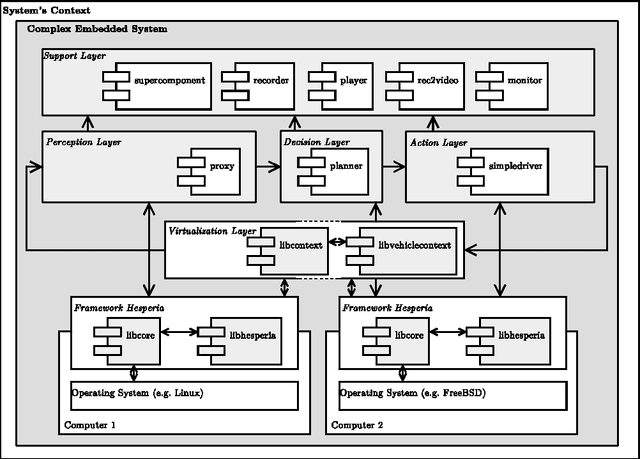
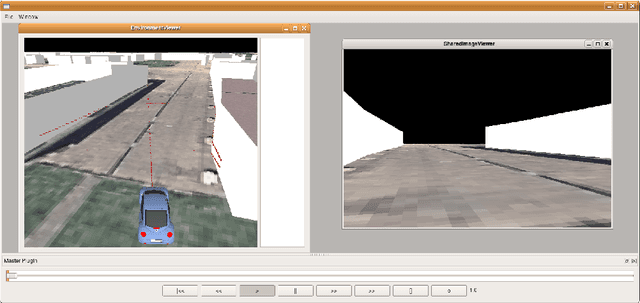
The 2007 DARPA Urban Challenge afforded the golden opportunity for the Technische Universit\"at Braunschweig to demonstrate its abilities to develop an autonomously driving vehicle to compete with the world's best competitors. After several stages of qualification, our team CarOLO qualified early for the DARPA Urban Challenge Final Event and was among only eleven teams from initially 89 competitors to compete in the final. We had the ability to work together in a large group of experts, each contributing his expertise in his discipline, and significant organisational, financial and technical support by local sponsors who helped us to become the best non-US team. In this report, we describe the 2007 DARPA Urban Challenge, our contribution "Caroline", the technology and algorithms along with her performance in the DARPA Urban Challenge Final Event on November 3, 2007.
* 68 pages, 7 figures
Black-box Integration of Heterogeneous Modeling Languages for Cyber-Physical Systems
Sep 08, 2014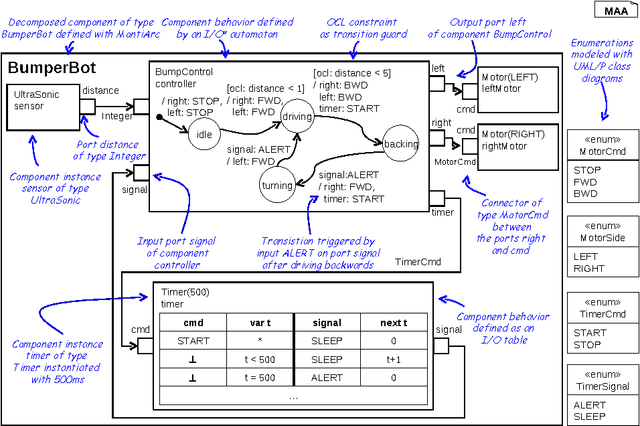
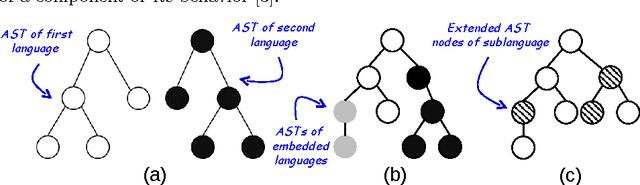
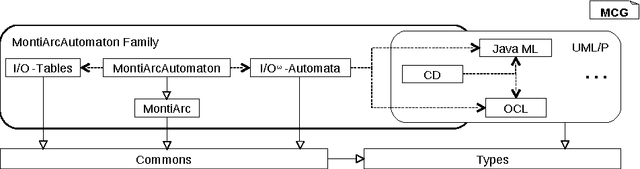
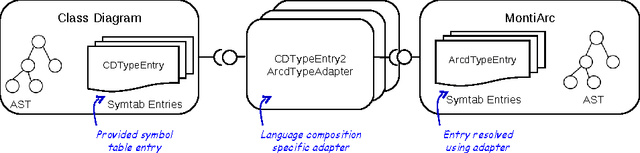
Robots belong to a class of Cyber-Physical Systems where complex software as a mobile device has to full tasks in a complex environment. Modeling robotics applications for analysis and code generation requires modeling languages for the logical software architecture and the system behavior. The MontiArcAutomaton modeling framework integrates six independently developed modeling languages to model robotics applications: a component & connector architecture description language, automata, I/O tables, class diagrams, OCL, and a Java DSL. We describe how we integrated these languages into MontiArcAutomaton a-posteriori in a black-box integration fashion.
Rapid Integration and Calibration of New Sensors Using the Berkeley Aachen Robotics Toolkit (BART)
Sep 08, 2014
After the three DARPA Grand Challenge contests many groups around the world have continued to actively research and work toward an autonomous vehicle capable of accomplishing a mission in a given context (e.g. desert, city) while following a set of prescribed rules, but none has been completely successful in uncontrolled environments, a task that many people trivially fulfill every day. We believe that, together with improving the sensors used in cars and the artificial intelligence algorithms used to process the information, the community should focus on the systems engineering aspects of the problem, i.e. the limitations of the car (in terms of space, power, or heat dissipation) and the limitations of the software development cycle. This paper explores these issues and our experiences overcoming them.
Autonomous Driving - 5 Years after the Urban Challenge: The Anticipatory Vehicle as a Cyber-Physical System
Sep 01, 2014
In November 2007 the international competition DARPA Urban Challenge took place on the former George Airforce Base in Victorville, California to significantly promote the research and development on autonomously driving vehicles for urban environments. In the final race only eleven out of initially 89 competitors participated and "Boss" from Carnegie Mellon University succeeded. This paper summarizes results of the research carried out by all finalists within the last five years after the competition and provides an outlook where further investigation especially for software engineering is now necessary to achieve the goal of driving safely and reliably through urban environments with an anticipatory vehicle for the mass-market.
* 10 pages, 7 figures