 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Skill Based Robot Programming Language Using UML/P Statecharts
Sep 22, 2014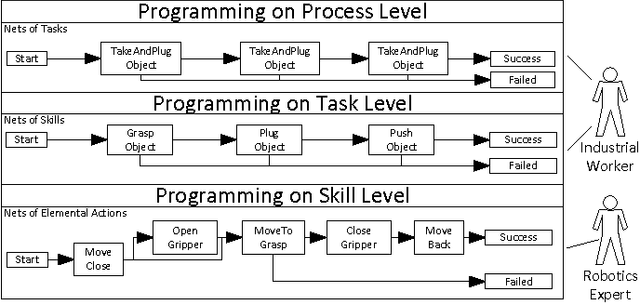
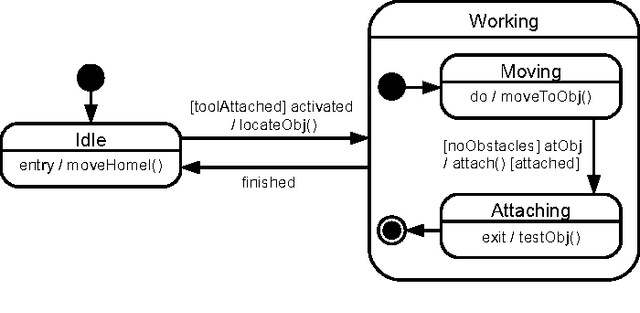
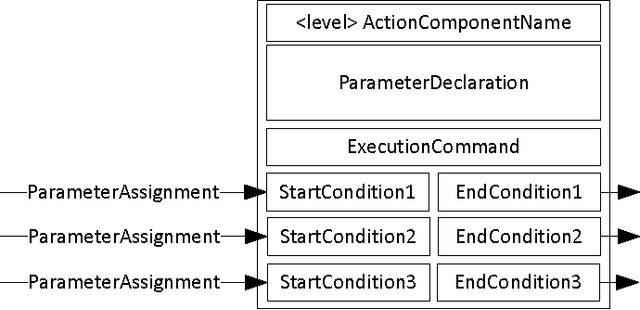
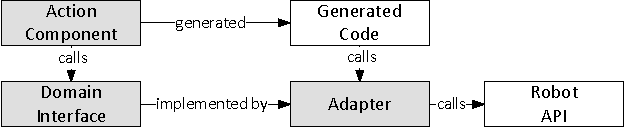
This paper introduces the new robot programming language LightRocks (Light Weight Robot Coding for Skills), a domain specific language (DSL) for robot programming. The language offers three different level of abstraction for robot programming. On lowest level skills are coded by domain experts. On a more abstract level these skills are supposed to be combined by shop floor workers or technicians to define tasks. The language is designed to allow as much flexibility as necessary on the lowest level of abstraction and is kept as simple as possible with the more abstract layers. A Statechart like model is used to describe the different levels of detail. For this we apply the UML/P and the language workbench MontiCore. To this end we are able to generate code while hiding controller specific implementation details. In addition the development in LightRocks is supported by a generic graphical editor implemented as an Eclipse plugin.
Probabilistic Search for Object Segmentation and Recognition
Aug 05, 2002
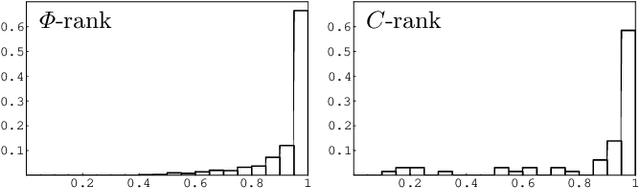
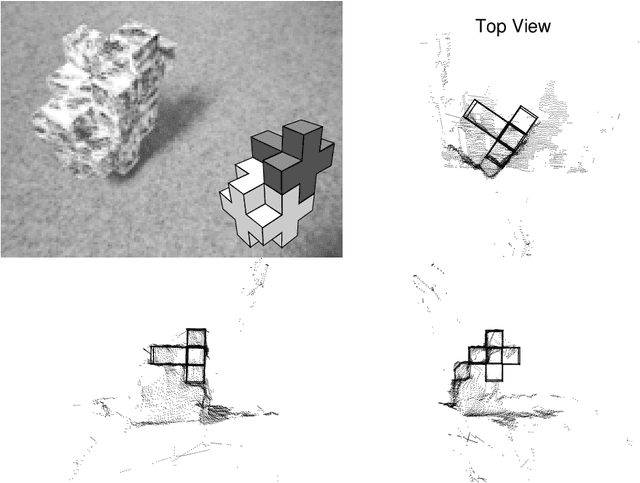
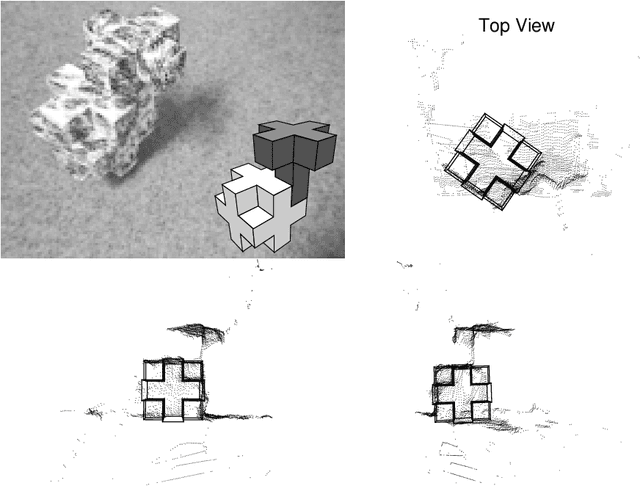
The problem of searching for a model-based scene interpretation is analyzed within a probabilistic framework. Object models are formulated as generative models for range data of the scene. A new statistical criterion, the truncated object probability, is introduced to infer an optimal sequence of object hypotheses to be evaluated for their match to the data. The truncated probability is partly determined by prior knowledge of the objects and partly learned from data. Some experiments on sequence quality and object segmentation and recognition from stereo data are presented. The article recovers classic concepts from object recognition (grouping, geometric hashing, alignment) from the probabilistic perspective and adds insight into the optimal ordering of object hypotheses for evaluation. Moreover, it introduces point-relation densities, a key component of the truncated probability, as statistical models of local surface shape.
* 18 pages, 5 figures