Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlack-box Integration of Heterogeneous Modeling Languages for Cyber-Physical Systems
Paper and Code
Sep 08, 2014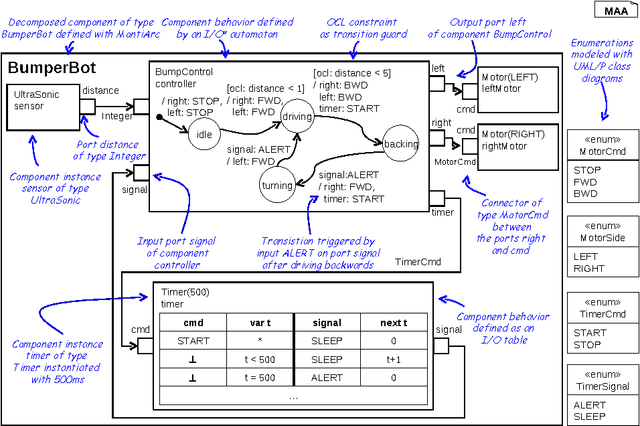
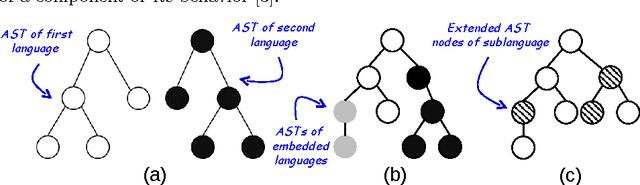
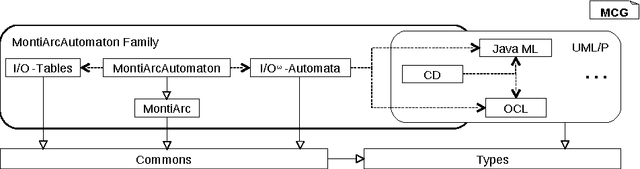
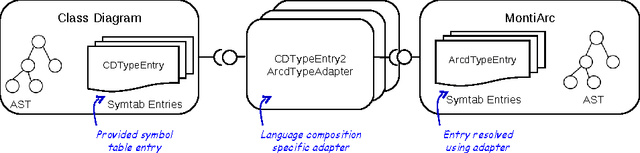
Robots belong to a class of Cyber-Physical Systems where complex software as a mobile device has to full tasks in a complex environment. Modeling robotics applications for analysis and code generation requires modeling languages for the logical software architecture and the system behavior. The MontiArcAutomaton modeling framework integrates six independently developed modeling languages to model robotics applications: a component & connector architecture description language, automata, I/O tables, class diagrams, OCL, and a Java DSL. We describe how we integrated these languages into MontiArcAutomaton a-posteriori in a black-box integration fashion.
* 6 pages, 4 figures. GEMOC Workshop 2013 - International Workshop on
The Globalization of Modeling Languages, Miami, Florida (USA), Volume 1102 of
CEUR Workshop Proceedings, CEUR-WS.org, 2013
View paper on