 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCaroline: An Autonomously Driving Vehicle for Urban Environments
Sep 22, 2014
The 2007 DARPA Urban Challenge afforded the golden opportunity for the Technische Universit\"at Braunschweig to demonstrate its abilities to develop an autonomously driving vehicle to compete with the world's best competitors. After several stages of qualification, our team CarOLO qualified early for the DARPA Urban Challenge Final Event and was among only eleven teams from initially 89 competitors to compete in the final. We had the ability to work together in a large group of experts, each contributing his expertise in his discipline, and significant organisational, financial and technical support by local sponsors who helped us to become the best non-US team. In this report, we describe the 2007 DARPA Urban Challenge, our contribution "Caroline", the technology and algorithms along with her performance in the DARPA Urban Challenge Final Event on November 3, 2007.
* 68 pages, 7 figures
Real-time Pedestrian Surveillance with Top View Cumulative Grids
Feb 06, 2014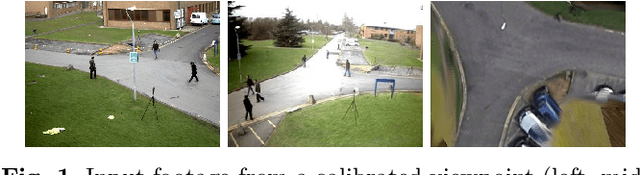



This manuscript presents an efficient approach to map pedestrian surveillance footage to an aerial view for global assessment of features. The analysis of the footages relies on low level computer vision and enable real-time surveillance. While we neglect object tracking, we introduce cumulative grids on top view scene flow visualization to highlight situations of interest in the footage. Our approach is tested on multiview footage both from RGB cameras and, for the first time in the field, on RGB-D-sensors.
The role of RGB-D benchmark datasets: an overview
Oct 08, 2013
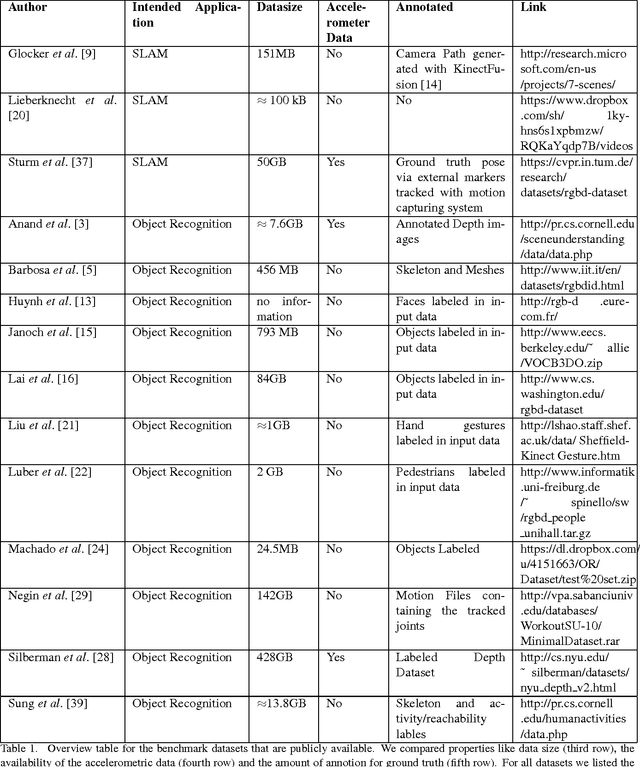

The advent of the Microsoft Kinect three years ago stimulated not only the computer vision community for new algorithms and setups to tackle well-known problems in the community but also sparked the launch of several new benchmark datasets to which future algorithms can be compared 019 to. This review of the literature and industry developments concludes that the current RGB-D benchmark datasets can be useful to determine the accuracy of a variety of applications of a single or multiple RGB-D sensors.
A State Of the Art Report on Research in Multiple RGB-D sensor Setups
Oct 08, 2013
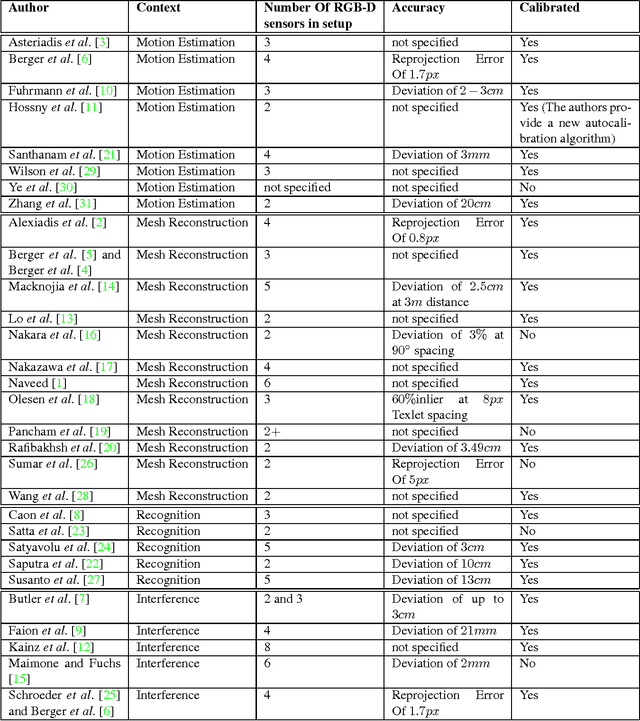

That the Microsoft Kinect, an RGB-D sensor, transformed the gaming and end consumer sector has been anticipated by the developers. That it also impacted in rigorous computer vision research has probably been a surprise to the whole community. Shortly before the commercial deployment of its successor, Kinect One, the research literature fills with resumees and state-of-the art papers to summarize the development over the past 3 years. This particular report describes significant research projects which have built on sensoring setups that include two or more RGB-D sensors in one scene.