Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Pedestrian Surveillance with Top View Cumulative Grids
Paper and Code
Feb 06, 2014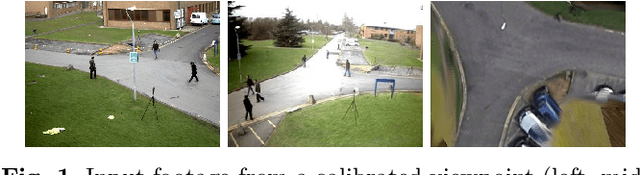



This manuscript presents an efficient approach to map pedestrian surveillance footage to an aerial view for global assessment of features. The analysis of the footages relies on low level computer vision and enable real-time surveillance. While we neglect object tracking, we introduce cumulative grids on top view scene flow visualization to highlight situations of interest in the footage. Our approach is tested on multiview footage both from RGB cameras and, for the first time in the field, on RGB-D-sensors.
View paper on