Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe role of RGB-D benchmark datasets: an overview
Paper and Code
Oct 08, 2013
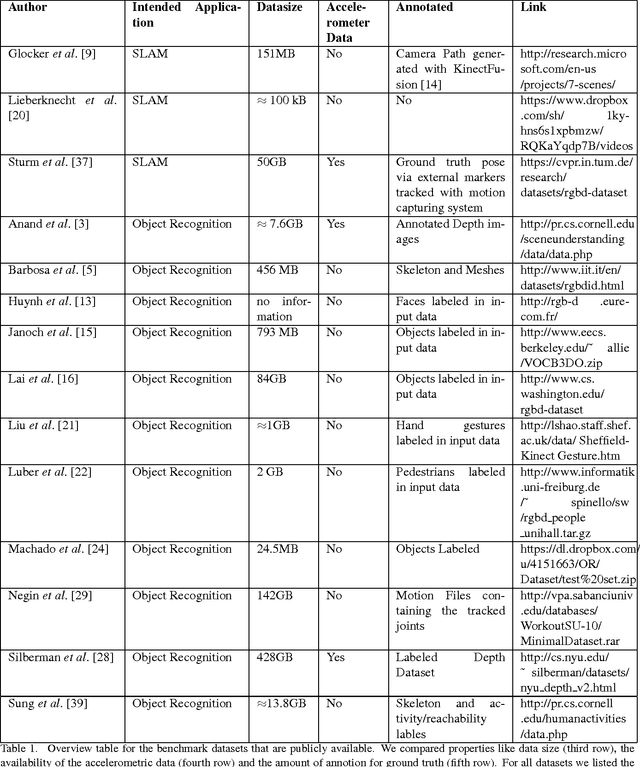

The advent of the Microsoft Kinect three years ago stimulated not only the computer vision community for new algorithms and setups to tackle well-known problems in the community but also sparked the launch of several new benchmark datasets to which future algorithms can be compared 019 to. This review of the literature and industry developments concludes that the current RGB-D benchmark datasets can be useful to determine the accuracy of a variety of applications of a single or multiple RGB-D sensors.
* 6 pages
View paper on