 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Dexterous Bidirectional Interaction in Uncertain Conditions for Medical Robotics
Jun 20, 2022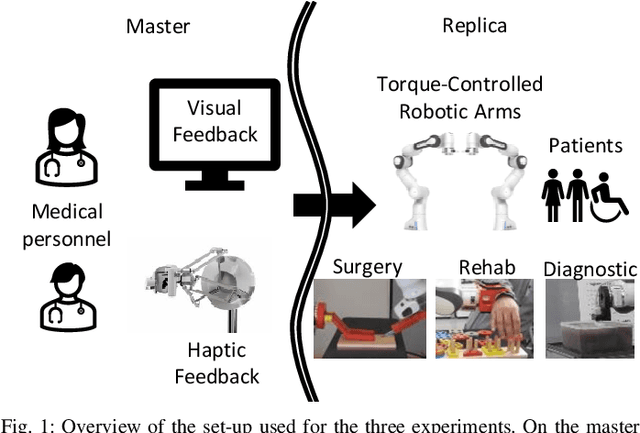
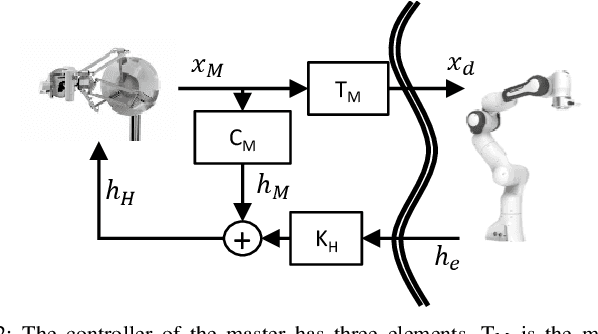
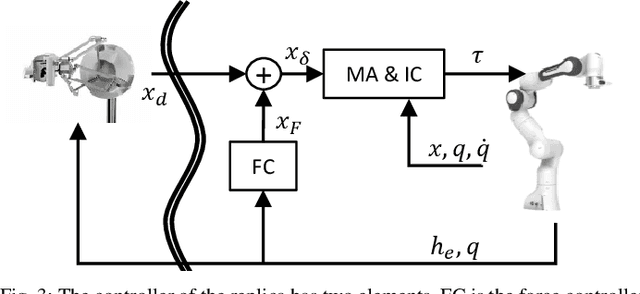
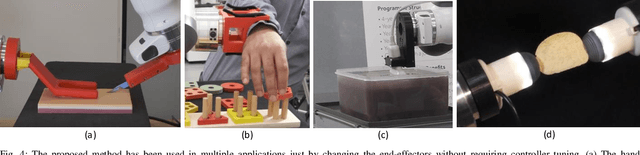
Medical robotics can help improve and extend the reach of healthcare services. A major challenge for medical robots is the complex physical interaction between the robot and the patients which is required to be safe. This work presents the preliminary evaluation of a recently introduced control architecture based on the Fractal Impedance Control (FIC) in medical applications. The deployed FIC architecture is robust to delay between the master and the replica robots. It can switch online between an admittance and impedance behaviour, and it is robust to interaction with unstructured environments. Our experiments analyse three scenarios: teleoperated surgery, rehabilitation, and remote ultrasound scan. The experiments did not require any adjustment of the robot tuning, which is essential in medical applications where the operators do not have an engineering background required to tune the controller. Our results show that is possible to teleoperate the robot to cut using a scalpel, do an ultrasound scan, and perform remote occupational therapy. However, our experiments also highlighted the need for a better robots embodiment to precisely control the system in 3D dynamic tasks.
Robust and Dexterous Dual-arm Tele-Cooperation using Fractal Impedance Control
Aug 10, 2021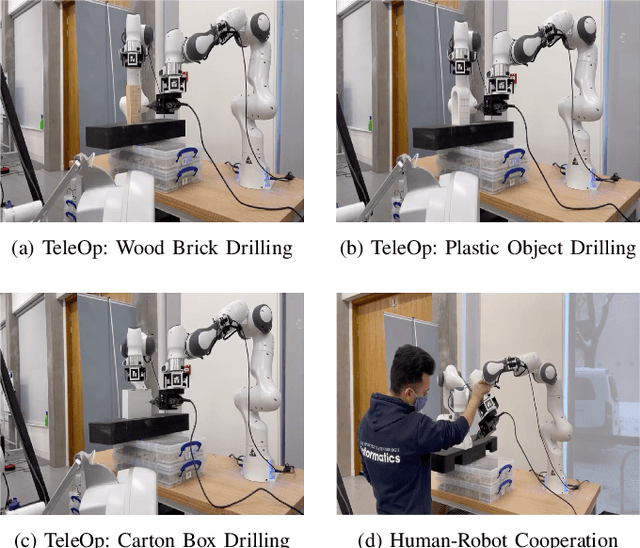
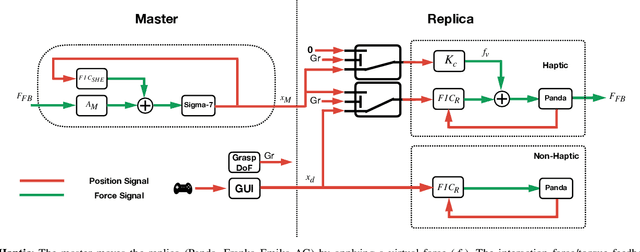
Deploying robots from isolated operations to shared environments has been an increasing trend in robotics for the last decades. However, the requirement of robust interaction in highly variable environments is still beyond the capability of most robots. We proposed to achieve robustness of various interactions by using the Fractal Impedance Control (FIC) and exploiting its non-linear stiffness to adapt to multiple cooperative scenarios, which is applicable to both manipulation and teleoperation applications. The proposed method was evaluated by a wide range of experiments: drilling, moving objects with unknown dynamics, and interacting with humans. The extensive validations demonstrated that the proposed method is very robust in presence of delays and reduced bandwidth in the communication link between master and follower. The results confirmed that the proposed method can enhance the robustness significantly and allow switching tasks freely between manipulation, human-robot cooperation and teleoperation without the need of extensive re-tuning of the controllers.
HapFIC: An Adaptive Force/Position Controller for Safe Environment Interaction in Articulated Systems
Jul 20, 2021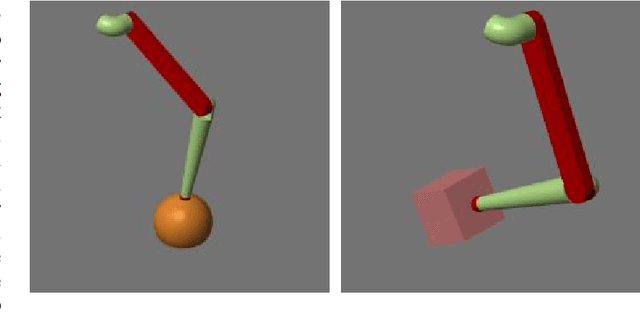

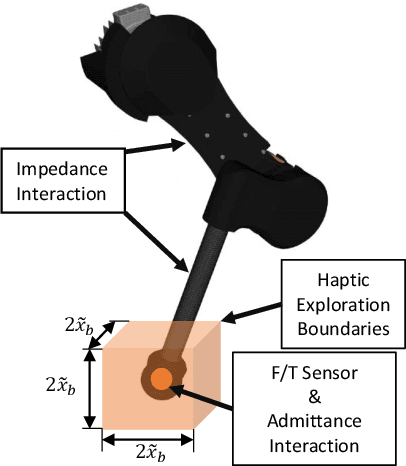

Haptic interaction is essential for the dynamic dexterity of animals, which seamlessly switch from an impedance to an admittance behaviour using the force feedback from their proprioception. However, this ability is extremely challenging to reproduce in robots, especially when dealing with complex interaction dynamics, distributed contacts, and contact switching. Current model-based controllers require accurate interaction modelling to account for contacts and stabilise the interaction. In this manuscript, we propose an adaptive force/position controller that exploits the fractal impedance controller's passivity and non-linearity to execute a finite search algorithm using the force feedback signal from the sensor at the end-effector. The method is computationally inexpensive, opening the possibility to deal with distributed contacts in the future. We evaluated the architecture in physics simulation and showed that the controller can robustly control the interaction with objects of different dynamics without violating the maximum allowable target forces or causing numerical instability even for very rigid objects. The proposed controller can also autonomously deal with contact switching and may find application in multiple fields such as legged locomotion, rehabilitation and assistive robotics.
Bio-mimetic Adaptive Force/Position Control Using Fractal Impedance
Mar 03, 2020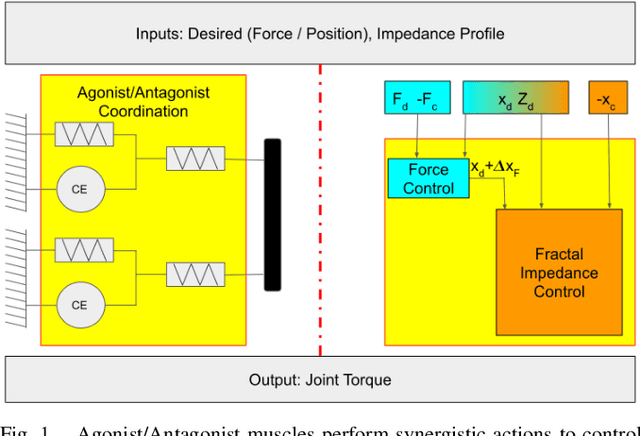


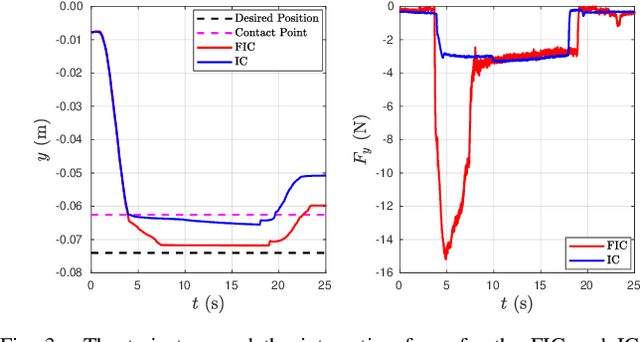
The ability of animals to interact with complex dynamics is unmatched in robots. Especially important to the interaction performances is the online adaptation of body dynamics, which can be modeled as an impedance behaviour. However, the variable impedance controller still possesses a challenge in the current control frameworks due to the difficulties of retaining stability when adapting the controller gains. The fractal impedance controller has been recently proposed to solve this issue. However, it still has limitations such as sudden jumps in force when it starts to converge to the desired position and the lack of a force feedback loop. In this manuscript, two improvements are made to the control framework to solve these limitations. The force discontinuity has been addressed introducing a modulation of the impedance via a virtual antagonist that modulates the output force. The force tracking has been modeled after the parallel force/position controller architecture. In contrast to traditional methods, the fractal impedance controller enables the implementation of a search algorithm on the force feedback to adapt its behaviour on the external environment instead of on relying on \textit{a priori} knowledge of the external dynamics. Preliminary simulation results presented in this paper show the feasibility of the proposed approach, and it allows to evaluate the trade-off that needs to be made when relying on the proposed controller for interaction. In conclusion, the proposed method mimics the behaviour of an agonist/antagonist system adapting to unknown external dynamics, and it may find application in computational neuroscience, haptics, and interaction control.
Robust High-Transparency Haptic Exploration for Dexterous Telemanipulation
Mar 03, 2020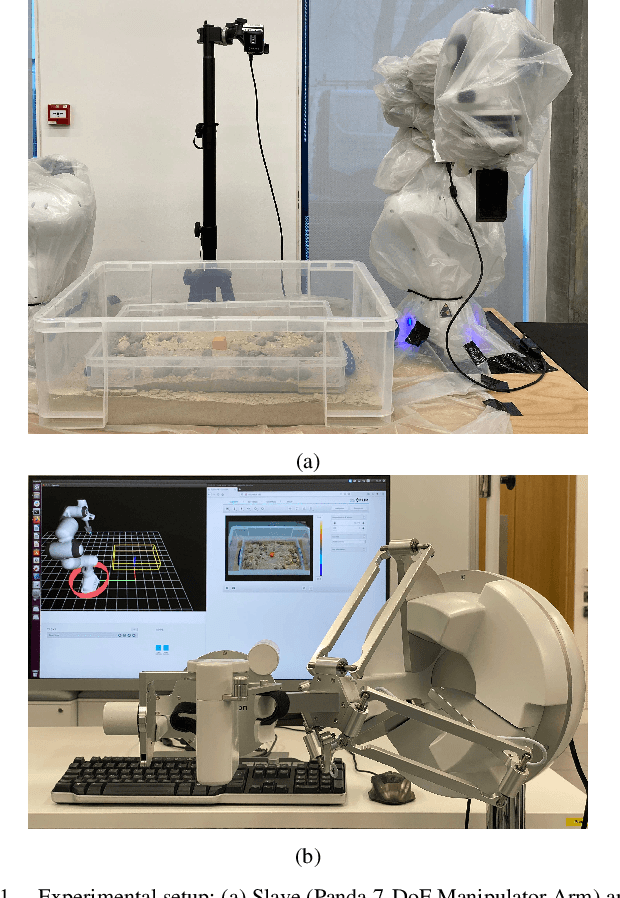

Robot teleoperation has been proposed as a solution to perform complex tasks in dangerous or remote environments. Teleoperation dexterity is not yet sufficient to enable effective interaction control, even in short-range operation, and low communication delays between the slave and the master. This manuscript explores the development of a haptic teleoperation setup that relies upon a recently proposed passive impedance controller, called Fractal Impedance Controller (FIC). The controller has a state-dependent impedance which enables to tune the slave task accuracy. The proposed controller has been compared with a similar setup using a traditional impedance controller. The results show that the proposed control architecture has higher transparency of interaction compared to the impedance controller. A preliminary study on the ability of an expert user to perform dexterous tasks has been conducted maintaining constant controller parameters. The tasks included opening an electrical box, driving a pile in the sand, pushing a ball on rough terrain, moving a sponge in an obstacle course, and pushing an E-stop button. The results show that the proposed method can complete all the task while the impedance controller on the slave could not. Furthermore, the FIC enables a shorter completion time on the tasks completed that have been also completed from the traditional impedance controller (pushing a ball, moving the sponge, and pushing E-Stop).
Fractal Impedance for Passive Controllers
Nov 12, 2019
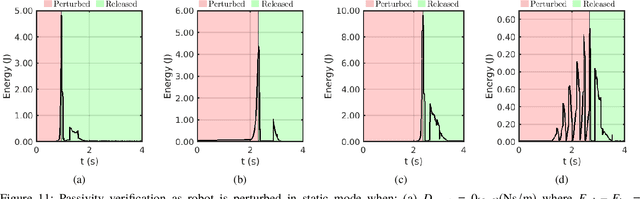
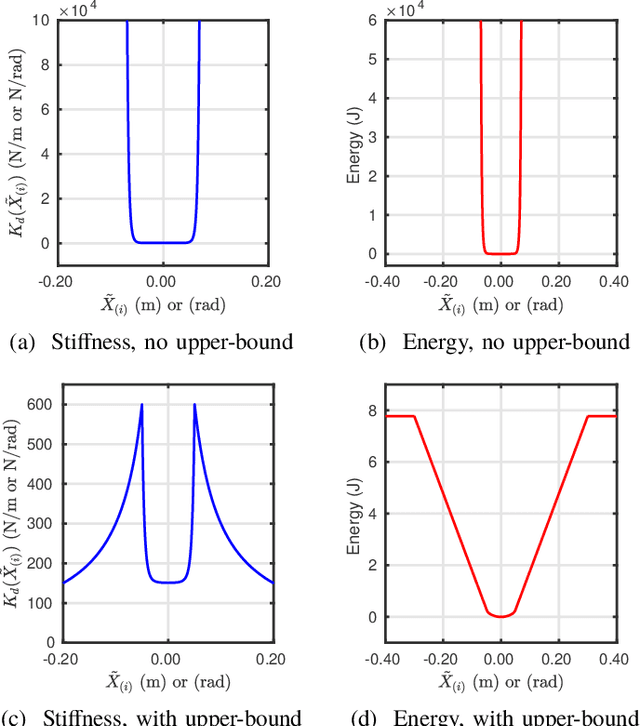
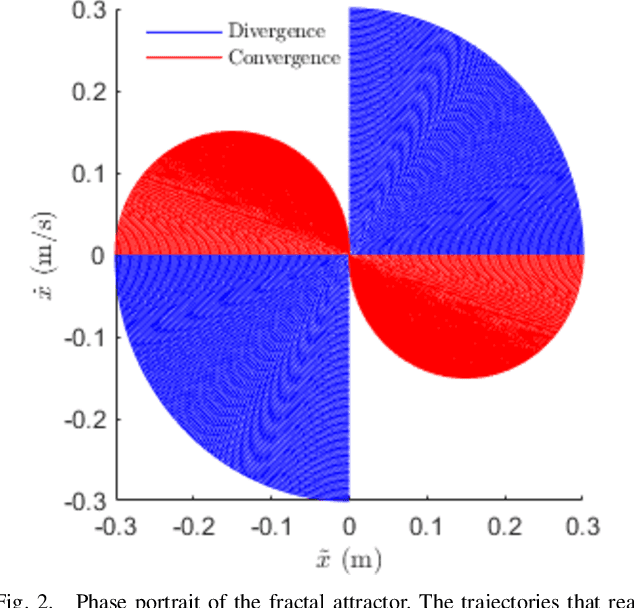
During the last decade, there has been increasing interest in new control frameworks to move robots from their industrial cages to unstructured environments where they may coexist with humans. Despite significant improvement in some specific applications (e.g., medical robotics), there is still the need of a general control framework to improve the robots' dynamics interaction performance without limiting system safety. The passive control framework has shown promising results in this direction; however, it relies on virtual energy tanks that can guarantee passivity as long as they do not run out of energy. In this paper, a fractal attractor is proposed to implement a variable impedance controller that is able to retain passivity without relying on the energy tank framework. The results prove that the proposed method can accurately track trajectories and apply forces at the end-effector. Furthermore, it can automatically deal with the extra energy introduced by changes in interaction conditions, null-space controller and environment. Therefore, These properties make the controller ideal for applications where the dynamic interaction at the end-effector is difficult to be characterized in advance, such as human-robot interaction and unknown dynamics.
A Projected Inverse Dynamics Approach for Dual-arm Cartesian Impedance Control
Jul 03, 2017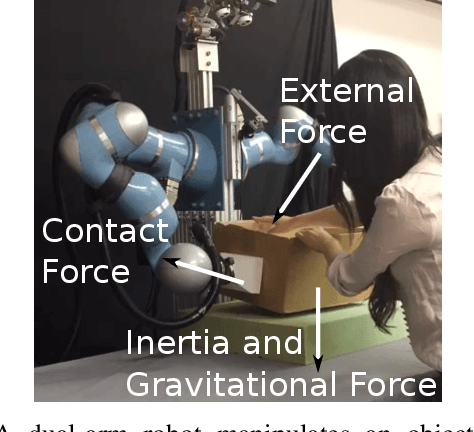
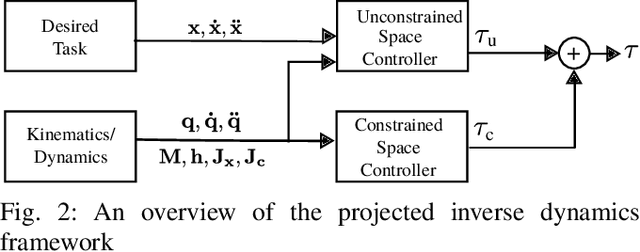
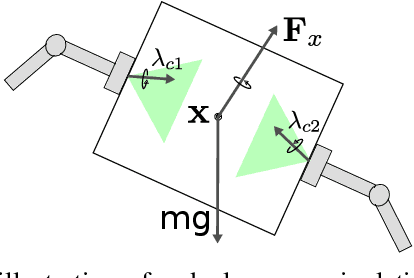
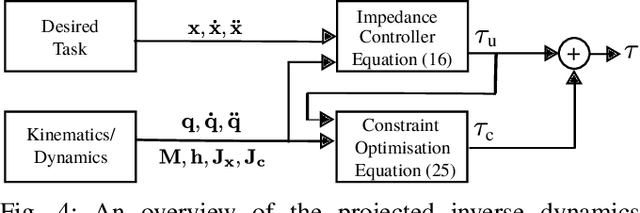
We propose a method for dual-arm manipulation of rigid objects, subject to external disturbance. The problem is formulated as a Cartesian impedance controller within a projected inverse dynamics framework. We use the constrained component of the controller to enforce contact and the unconstrained controller to accomplish the task with a desired 6-DOF impedance behaviour. Furthermore, the proposed method optimises the torque required to maintain contact, subject to unknown disturbances, and can do so without direct measurement of external force. The techniques are evaluated on a single-arm wiping a table and a dual-arm platform manipulating a rigid object of unknown mass and with human interaction.