 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Score: Tuning Cluster Schedulers through Reinforcement Learning
Mar 11, 2026Efficiently allocating incoming jobs to nodes in large-scale clusters can lead to substantial improvements in both cluster utilization and job performance. In order to allocate incoming jobs, cluster schedulers usually rely on a set of scoring functions to rank feasible nodes. Results from individual scoring functions are usually weighted equally, which could lead to sub-optimal deployments as the one-size-fits-all solution does not take into account the characteristics of each workload. Tuning the weights of scoring functions, however, requires expert knowledge and is computationally expensive. This paper proposes a reinforcement learning approach for learning the weights in scheduler scoring algorithms with the overall objective of improving the end-to-end performance of jobs for a given cluster. Our approach is based on percentage improvement reward, frame-stacking, and limiting domain information. We propose a percentage improvement reward to address the objective of multi-step parameter tuning. The inclusion of frame-stacking allows for carrying information across an optimization experiment. Limiting domain information prevents overfitting and improves performance in unseen clusters and workloads. The policy is trained on different combinations of workloads and cluster setups. We demonstrate the proposed approach improves performance on average by 33\% compared to fixed weights and 12\% compared to the best-performing baseline in a lab-based serverless scenario.
Retrieval or Representation? Reassessing Benchmark Gaps in Multilingual and Visually Rich RAG
Mar 04, 2026Retrieval-augmented generation (RAG) is a common way to ground language models in external documents and up-to-date information. Classical retrieval systems relied on lexical methods such as BM25, which rank documents by term overlap with corpus-level weighting. End-to-end multimodal retrievers trained on large query-document datasets claim substantial improvements over these approaches, especially for multilingual documents with complex visual layouts. We demonstrate that better document representation is the primary driver of benchmark improvements. By systematically varying transcription and preprocessing methods while holding the retrieval mechanism fixed, we demonstrate that BM25 can recover large gaps on multilingual and visual benchmarks. Our findings call for decomposed evaluation benchmarks that separately measure transcription and retrieval capabilities, enabling the field to correctly attribute progress and focus effort where it matters.
Lightweight Online Adaption for Time Series Foundation Model Forecasts
Feb 18, 2025Foundation models (FMs) have emerged as a promising approach for time series forecasting. While effective, FMs typically remain fixed during deployment due to the high computational costs of learning them online. Consequently, deployed FMs fail to adapt their forecasts to current data characteristics, despite the availability of online feedback from newly arriving data. This raises the question of whether FM performance can be enhanced by the efficient usage of this feedback. We propose AdapTS to answer this question. AdapTS is a lightweight mechanism for the online adaption of FM forecasts in response to online feedback. AdapTS consists of two parts: a) the AdapTS-Forecaster which is used to learn the current data distribution; and b) the AdapTS-Weighter which is used to combine the forecasts of the FM and the AdapTS-Forecaster. We evaluate the performance of AdapTS in conjunction with several recent FMs across a suite of standard time series datasets. In all of our experiments we find that using AdapTS improves performance. This work demonstrates how efficient usage of online feedback can be used to improve FM forecasts.
Performance of Zero-Shot Time Series Foundation Models on Cloud Data
Feb 18, 2025Time series foundation models (FMs) have emerged as a popular paradigm for zero-shot multi-domain forecasting. FMs are trained on numerous diverse datasets and claim to be effective forecasters across multiple different time series domains, including cloud data. In this work we investigate this claim, exploring the effectiveness of FMs on cloud data. We demonstrate that many well-known FMs fail to generate meaningful or accurate zero-shot forecasts in this setting. We support this claim empirically, showing that FMs are outperformed consistently by simple linear baselines. We also illustrate a number of interesting pathologies, including instances where FMs suddenly output seemingly erratic, random-looking forecasts. Our results suggest a widespread failure of FMs to model cloud data.
DAM: Towards A Foundation Model for Time Series Forecasting
Jul 25, 2024It is challenging to scale time series forecasting models such that they forecast accurately for multiple distinct domains and datasets, all with potentially different underlying collection procedures (e.g., sample resolution), patterns (e.g., periodicity), and prediction requirements (e.g., reconstruction vs. forecasting). We call this general task universal forecasting. Existing methods usually assume that input data is regularly sampled, and they forecast to pre-determined horizons, resulting in failure to generalise outside of the scope of their training. We propose the DAM - a neural model that takes randomly sampled histories and outputs an adjustable basis composition as a continuous function of time for forecasting to non-fixed horizons. It involves three key components: (1) a flexible approach for using randomly sampled histories from a long-tail distribution, that enables an efficient global perspective of the underlying temporal dynamics while retaining focus on the recent history; (2) a transformer backbone that is trained on these actively sampled histories to produce, as representational output, (3) the basis coefficients of a continuous function of time. We show that a single univariate DAM, trained on 25 time series datasets, either outperformed or closely matched existing SoTA models at multivariate long-term forecasting across 18 datasets, including 8 held-out for zero-shot transfer, even though these models were trained to specialise for each dataset-horizon combination. This single DAM excels at zero-shot transfer and very-long-term forecasting, performs well at imputation, is interpretable via basis function composition and attention, can be tuned for different inference-cost requirements, is robust to missing and irregularly sampled data {by design}.
How Does It Function? Characterizing Long-term Trends in Production Serverless Workloads
Dec 15, 2023This paper releases and analyzes two new Huawei cloud serverless traces. The traces span a period of over 7 months with over 1.4 trillion function invocations combined. The first trace is derived from Huawei's internal workloads and contains detailed per-second statistics for 200 functions running across multiple Huawei cloud data centers. The second trace is a representative workload from Huawei's public FaaS platform. This trace contains per-minute arrival rates for over 5000 functions running in a single Huawei data center. We present the internals of a production FaaS platform by characterizing resource consumption, cold-start times, programming languages used, periodicity, per-second versus per-minute burstiness, correlations, and popularity. Our findings show that there is considerable diversity in how serverless functions behave: requests vary by up to 9 orders of magnitude across functions, with some functions executed over 1 billion times per day; scheduling time, execution time and cold-start distributions vary across 2 to 4 orders of magnitude and have very long tails; and function invocation counts demonstrate strong periodicity for many individual functions and on an aggregate level. Our analysis also highlights the need for further research in estimating resource reservations and time-series prediction to account for the huge diversity in how serverless functions behave. Datasets and code available at https://github.com/sir-lab/data-release
Achieving Dexterous Bidirectional Interaction in Uncertain Conditions for Medical Robotics
Jun 20, 2022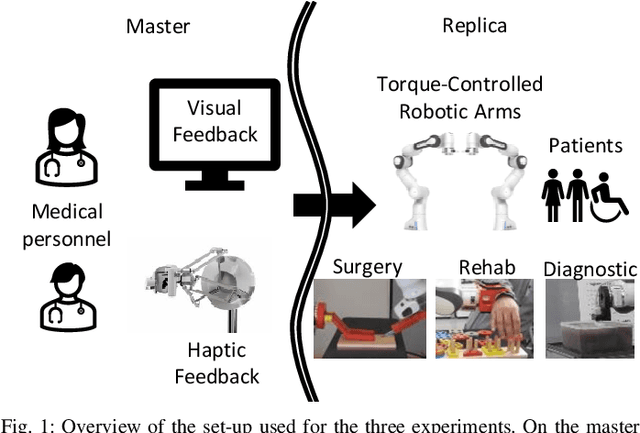
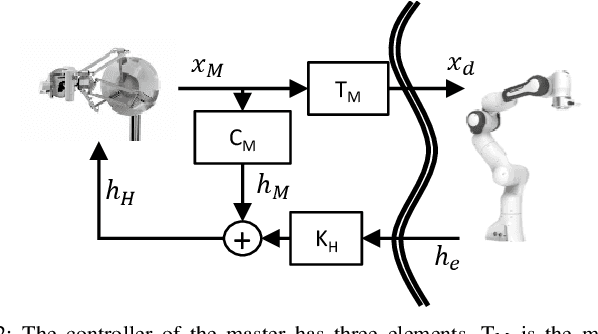
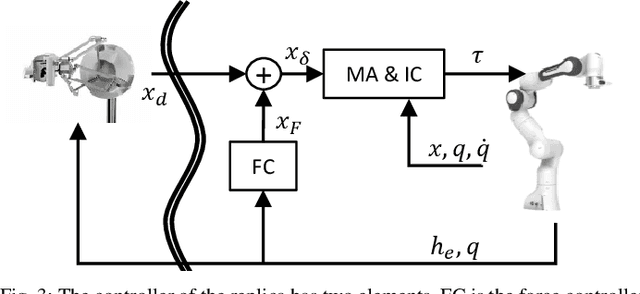
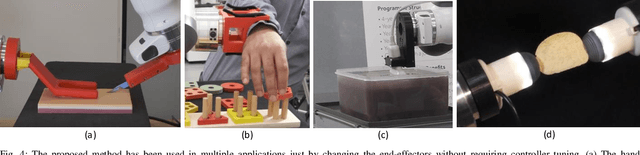
Medical robotics can help improve and extend the reach of healthcare services. A major challenge for medical robots is the complex physical interaction between the robot and the patients which is required to be safe. This work presents the preliminary evaluation of a recently introduced control architecture based on the Fractal Impedance Control (FIC) in medical applications. The deployed FIC architecture is robust to delay between the master and the replica robots. It can switch online between an admittance and impedance behaviour, and it is robust to interaction with unstructured environments. Our experiments analyse three scenarios: teleoperated surgery, rehabilitation, and remote ultrasound scan. The experiments did not require any adjustment of the robot tuning, which is essential in medical applications where the operators do not have an engineering background required to tune the controller. Our results show that is possible to teleoperate the robot to cut using a scalpel, do an ultrasound scan, and perform remote occupational therapy. However, our experiments also highlighted the need for a better robots embodiment to precisely control the system in 3D dynamic tasks.
Vision-based system identification and 3D keypoint discovery using dynamics constraints
Sep 13, 2021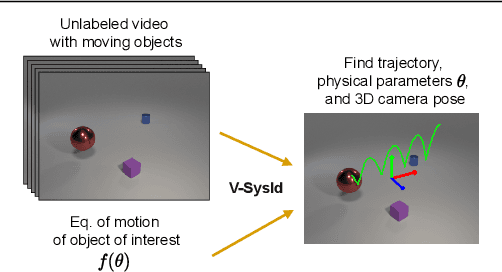
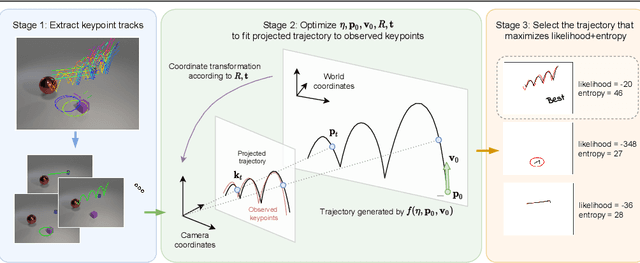
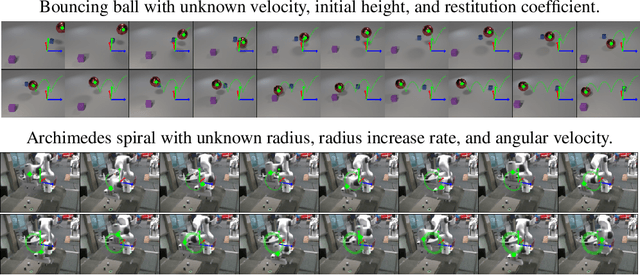
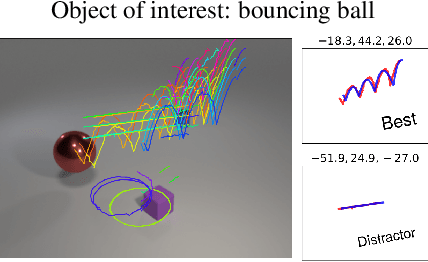
This paper introduces V-SysId, a novel method that enables simultaneous keypoint discovery, 3D system identification, and extrinsic camera calibration from an unlabeled video taken from a static camera, using only the family of equations of motion of the object of interest as weak supervision. V-SysId takes keypoint trajectory proposals and alternates between maximum likelihood parameter estimation and extrinsic camera calibration, before applying a suitable selection criterion to identify the track of interest. This is then used to train a keypoint tracking model using supervised learning. Results on a range of settings (robotics, physics, physiology) highlight the utility of this approach.
Vid2Param: Online system identification from video for robotics applications
Jul 15, 2019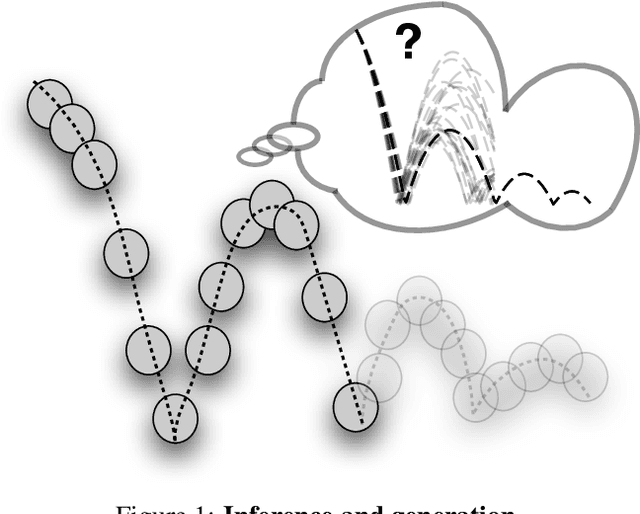
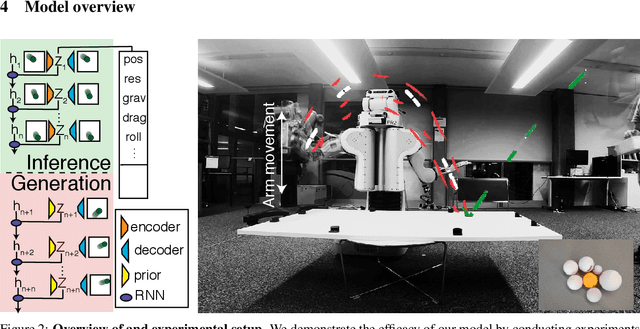
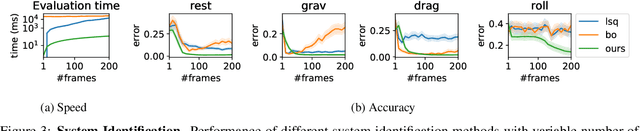
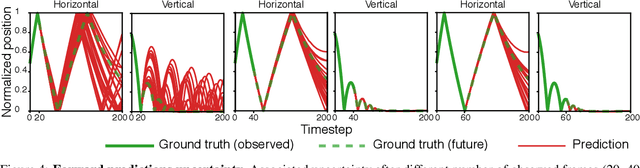
Robots performing tasks in dynamic environments would benefit greatly from understanding the underlying environment motion, in order to make future predictions and to synthesize effective control policies that use this inductive bias. Online system identification is therefore a fundamental requirement for robust autonomous agents. When the dynamics involves multiple modes (due to contacts or interactions between objects), and when system identification must proceed directly from a rich sensory stream such as video, then traditional methods for system identification may not be well suited. We propose an approach wherein fast parameter estimation with a model can be seamlessly combined with a recurrent variational autoencoder. Our Physics-based recurrent variational autoencoder model includes an additional loss that enforces conformity with the structure of a physically based dynamics model. This enables the resulting model to encode parameters such as position, velocity, restitution, air drag and other physical properties of the system. The model can be trained entirely in simulation, in an end-to-end manner with domain randomization, to perform online system identification, and probabilistic forward predictions of parameters of interest. We benchmark against existing system identification methods and demonstrate that Vid2Param outperforms the baselines in terms of speed and accuracy of identification, and also provides uncertainty quantification in the form of a distribution over future trajectories. Furthermore, we illustrate the utility of this in physical experiments wherein a PR2 robot with velocity constrained arm must intercept a bouncing ball, by estimating the physical parameters of this ball directly from the video trace after the ball is released.
Active Localization of Gas Leaks using Fluid Simulation
Jan 28, 2019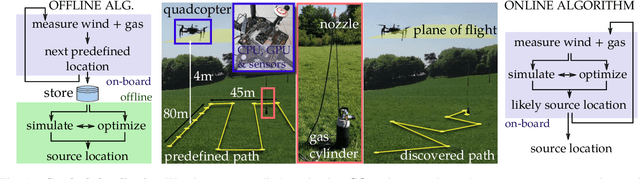
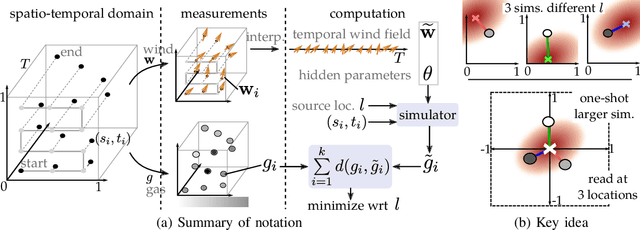
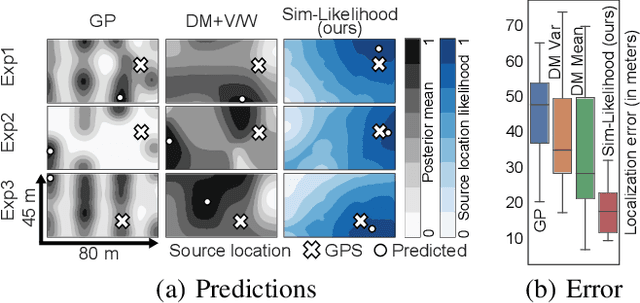
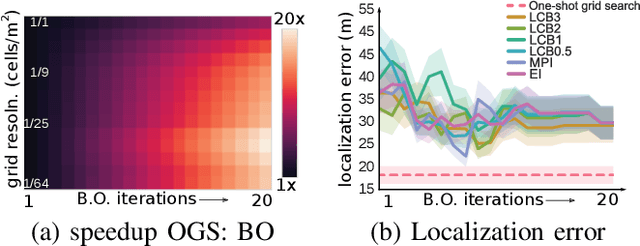
Sensors are routinely mounted on robots to acquire various forms of measurements in spatio-temporal fields. Locating features within these fields and reconstruction (mapping) of the dense fields can be challenging in resource-constrained situations, such as when trying to locate the source of a gas leak from a small number of measurements. In such cases, a model of the underlying complex dynamics can be exploited to discover informative paths within the field. We use a fluid simulator as a model, to guide inference for the location of a gas leak. We perform localization via minimization of the discrepancy between observed measurements and gas concentrations predicted by the simulator. Our method is able to account for dynamically varying parameters of wind flow (e.g., direction and strength), and its effects on the observed distribution of gas. We develop algorithms for off-line inference as well as for on-line path discovery via active sensing. We demonstrate the efficiency, accuracy and versatility of our algorithm using experiments with a physical robot conducted in outdoor environments. We deploy an unmanned air vehicle (UAV) mounted with a CO2 sensor to automatically seek out a gas cylinder emitting CO2 via a nozzle. We evaluate the accuracy of our algorithm by measuring the error in the inferred location of the nozzle, based on which we show that our proposed approach is competitive with respect to state of the art baselines.