Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based system identification and 3D keypoint discovery using dynamics constraints
Paper and Code
Sep 13, 2021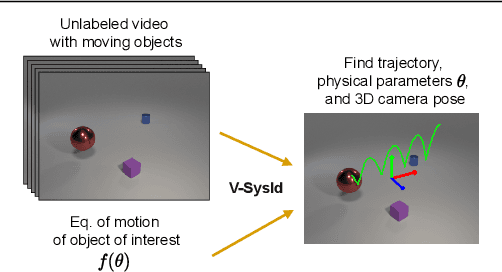
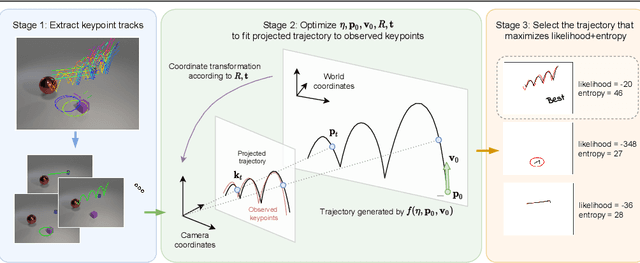
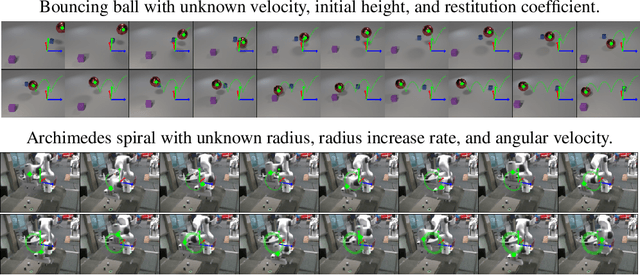
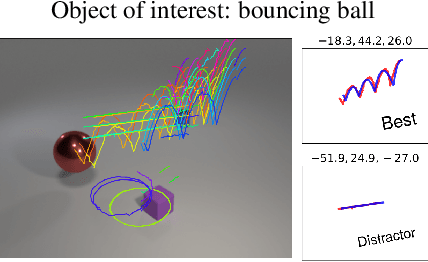
This paper introduces V-SysId, a novel method that enables simultaneous keypoint discovery, 3D system identification, and extrinsic camera calibration from an unlabeled video taken from a static camera, using only the family of equations of motion of the object of interest as weak supervision. V-SysId takes keypoint trajectory proposals and alternates between maximum likelihood parameter estimation and extrinsic camera calibration, before applying a suitable selection criterion to identify the track of interest. This is then used to train a keypoint tracking model using supervised learning. Results on a range of settings (robotics, physics, physiology) highlight the utility of this approach.
View paper on