 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferability Through Cooperative Competitions
Mar 29, 2026This paper presents a novel framework for cooperative robotics competitions (coopetitions) that promote the transferability and composability of robotics modules, including software, hardware, and data, across heterogeneous robotic systems. The framework is designed to incentivize collaboration between teams through structured task design, shared infrastructure, and a royalty-based scoring system. As a case study, the paper details the implementation and outcomes of the first euROBIN Coopetition, held under the European Robotics and AI Network (euROBIN), which featured fifteen robotic platforms competing across Industrial, Service, and Outdoor domains. The study highlights the practical challenges of achieving module reuse in real-world scenarios, particularly in terms of integration complexity and system compatibility. It also examines participant performance, integration behavior, and team feedback to assess the effectiveness of the framework. The paper concludes with lessons learned and recommendations for future coopetitions, including improveme
Adapt as You Say: Online Interactive Bimanual Skill Adaptation via Human Language Feedback
Mar 27, 2026Developing general-purpose robots capable of autonomously operating in human living environments requires the ability to adapt to continuously evolving task conditions. However, adapting high-dimensional coordinated bimanual skills to novel task variations at deployment remains a fundamental challenge. In this work, we present BiSAIL (Bimanual Skill Adaptation via Interactive Language), a novel framework that enables zero-shot online adaptation of offline-learned bimanual skills through interactive language feedback. The key idea of BiSAIL is to adopt a hierarchical reason-then-modulate paradigm, which first infers generalized adaptation objectives from multimodal task variations, and then adapts bimanual motions via diffusion modulation to achieve the inferred objectives. Extensive real-robot experiments across six bimanual tasks and two dual-arm platforms demonstrate that BiSAIL significantly outperforms existing methods in human-in-the-loop adaptability, task generalization and cross-embodiment scalability. This work enables the development of adaptive bimanual assistants that can be flexibly customized by non-expert users via intuitive verbal corrections. Experimental videos and code are available at https://rip4kobe.github.io/BiSAIL/.
CaFe-TeleVision: A Coarse-to-Fine Teleoperation System with Immersive Situated Visualization for Enhanced Ergonomics
Dec 17, 2025Teleoperation presents a promising paradigm for remote control and robot proprioceptive data collection. Despite recent progress, current teleoperation systems still suffer from limitations in efficiency and ergonomics, particularly in challenging scenarios. In this paper, we propose CaFe-TeleVision, a coarse-to-fine teleoperation system with immersive situated visualization for enhanced ergonomics. At its core, a coarse-to-fine control mechanism is proposed in the retargeting module to bridge workspace disparities, jointly optimizing efficiency and physical ergonomics. To stream immersive feedback with adequate visual cues for human vision systems, an on-demand situated visualization technique is integrated in the perception module, which reduces the cognitive load for multi-view processing. The system is built on a humanoid collaborative robot and validated with six challenging bimanual manipulation tasks. User study among 24 participants confirms that CaFe-TeleVision enhances ergonomics with statistical significance, indicating a lower task load and a higher user acceptance during teleoperation. Quantitative results also validate the superior performance of our system across six tasks, surpassing comparative methods by up to 28.89% in success rate and accelerating by 26.81% in completion time. Project webpage: https://clover-cuhk.github.io/cafe_television/
Towards Deploying VLA without Fine-Tuning: Plug-and-Play Inference-Time VLA Policy Steering via Embodied Evolutionary Diffusion
Nov 18, 2025Vision-Language-Action (VLA) models have demonstrated significant potential in real-world robotic manipulation. However, pre-trained VLA policies still suffer from substantial performance degradation during downstream deployment. Although fine-tuning can mitigate this issue, its reliance on costly demonstration collection and intensive computation makes it impractical in real-world settings. In this work, we introduce VLA-Pilot, a plug-and-play inference-time policy steering method for zero-shot deployment of pre-trained VLA without any additional fine-tuning or data collection. We evaluate VLA-Pilot on six real-world downstream manipulation tasks across two distinct robotic embodiments, encompassing both in-distribution and out-of-distribution scenarios. Experimental results demonstrate that VLA-Pilot substantially boosts the success rates of off-the-shelf pre-trained VLA policies, enabling robust zero-shot generalization to diverse tasks and embodiments. Experimental videos and code are available at: https://rip4kobe.github.io/vla-pilot/.
Extremum Flow Matching for Offline Goal Conditioned Reinforcement Learning
May 26, 2025Imitation learning is a promising approach for enabling generalist capabilities in humanoid robots, but its scaling is fundamentally constrained by the scarcity of high-quality expert demonstrations. This limitation can be mitigated by leveraging suboptimal, open-ended play data, often easier to collect and offering greater diversity. This work builds upon recent advances in generative modeling, specifically Flow Matching, an alternative to Diffusion models. We introduce a method for estimating the extremum of the learned distribution by leveraging the unique properties of Flow Matching, namely, deterministic transport and support for arbitrary source distributions. We apply this method to develop several goal-conditioned imitation and reinforcement learning algorithms based on Flow Matching, where policies are conditioned on both current and goal observations. We explore and compare different architectural configurations by combining core components, such as critic, planner, actor, or world model, in various ways. We evaluated our agents on the OGBench benchmark and analyzed how different demonstration behaviors during data collection affect performance in a 2D non-prehensile pushing task. Furthermore, we validated our approach on real hardware by deploying it on the Talos humanoid robot to perform complex manipulation tasks based on high-dimensional image observations, featuring a sequence of pick-and-place and articulated object manipulation in a realistic kitchen environment. Experimental videos and code are available at: https://hucebot.github.io/extremum_flow_matching_website/
From Vocal Instructions to Household Tasks: The Inria Tiago++ in the euROBIN Service Robots Coopetition
Dec 20, 2024This paper describes the Inria team's integrated robotics system used in the 1st euROBIN coopetition, during which service robots performed voice-activated household tasks in a kitchen setting.The team developed a modified Tiago++ platform that leverages a whole-body control stack for autonomous and teleoperated modes, and an LLM-based pipeline for instruction understanding and task planning. The key contributions (opens-sourced) are the integration of these components and the design of custom teleoperation devices, addressing practical challenges in the deployment of service robots.
Words2Contact: Identifying Support Contacts from Verbal Instructions Using Foundation Models
Jul 19, 2024



This paper presents Words2Contact, a language-guided multi-contact placement pipeline leveraging large language models and vision language models. Our method is a key component for language-assisted teleoperation and human-robot cooperation, where human operators can instruct the robots where to place their support contacts before whole-body reaching or manipulation using natural language. Words2Contact transforms the verbal instructions of a human operator into contact placement predictions; it also deals with iterative corrections, until the human is satisfied with the contact location identified in the robot's field of view. We benchmark state-of-the-art LLMs and VLMs for size and performance in contact prediction. We demonstrate the effectiveness of the iterative correction process, showing that users, even naive, quickly learn how to instruct the system to obtain accurate locations. Finally, we validate Words2Contact in real-world experiments with the Talos humanoid robot, instructed by human operators to place support contacts on different locations and surfaces to avoid falling when reaching for distant objects.
Flow Matching Imitation Learning for Multi-Support Manipulation
Jul 17, 2024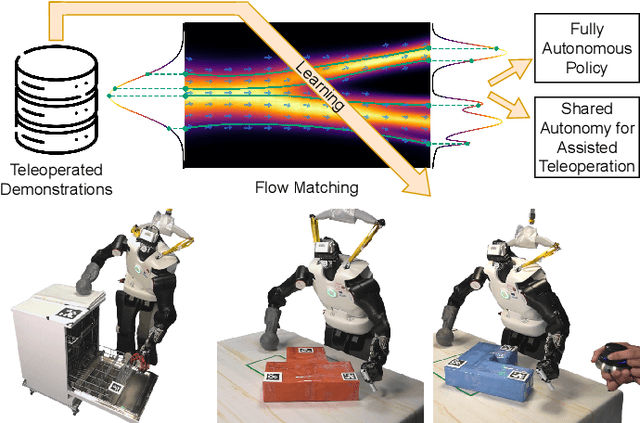
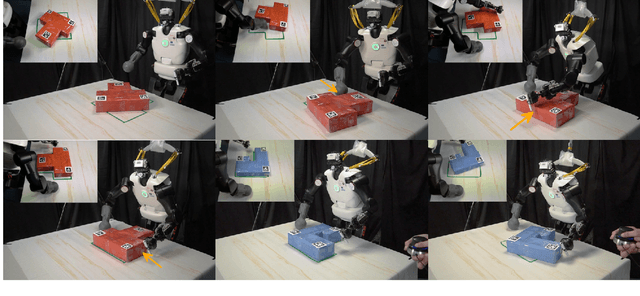
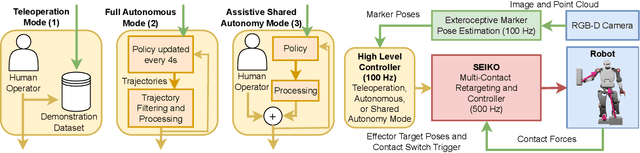
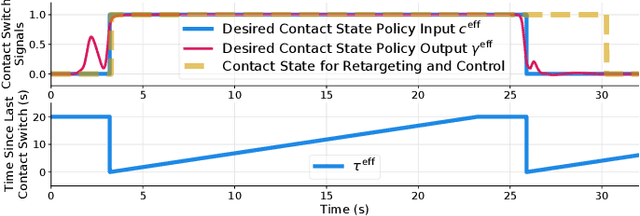
Humanoid robots could benefit from using their upper bodies for support contacts, enhancing their workspace, stability, and ability to perform contact-rich and pushing tasks. In this paper, we propose a unified approach that combines an optimization-based multi-contact whole-body controller with Flow Matching, a recently introduced method capable of generating multi-modal trajectory distributions for imitation learning. In simulation, we show that Flow Matching is more appropriate for robotics than Diffusion and traditional behavior cloning. On a real full-size humanoid robot (Talos), we demonstrate that our approach can learn a whole-body non-prehensile box-pushing task and that the robot can close dishwasher drawers by adding contacts with its free hand when needed for balance. We also introduce a shared autonomy mode for assisted teleoperation, providing automatic contact placement for tasks not covered in the demonstrations. Full experimental videos are available at: https://hucebot.github.io/flow_multisupport_website/
Multi-Contact Whole Body Force Control for Position-Controlled Robots
Jan 16, 2024Many humanoid and multi-legged robots are controlled in positions rather than in torques, preventing direct control of contact forces, and hampering their ability to create multiple contacts to enhance their balance, such as placing a hand on a wall or a handrail. This paper introduces the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) pipeline, drawing inspiration from flexibility models used in serial elastic actuators to indirectly control contact forces on traditional position-controlled robots. SEIKO formulates whole-body retargeting from Cartesian commands and admittance control using two quadratic programs solved in real time. We validated our pipeline with experiments on the real, full-scale humanoid robot Talos in various multicontact scenarios, including pushing tasks, far-reaching tasks, stair climbing, and stepping on sloped surfaces. This work opens the possibility of stable, contact-rich behaviors while getting around many of the challenges of torque-controlled robots. Code and videos are available at https://hucebot.github.io/seiko_controller_website/ .
Feasibility Retargeting for Multi-contact Teleoperation and Physical Interaction
Aug 07, 2023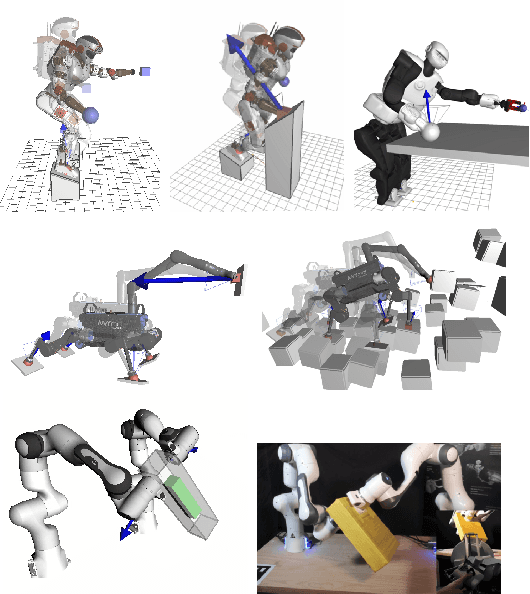



This short paper outlines two recent works on multi-contact teleoperation and the development of the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) framework. SEIKO adapts commands from the operator in real-time and ensures that the reference configuration sent to the underlying controller is feasible. Additionally, an admittance scheme is used to implement physical interaction, which is then combined with the operator's command and retargeted. SEIKO has been applied in simulations on various robots, including humanoid and quadruped robots designed for loco-manipulation. Furthermore, SEIKO has been tested on real hardware for bimanual heavy object carrying tasks.