 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow Matching Imitation Learning for Multi-Support Manipulation
Jul 17, 2024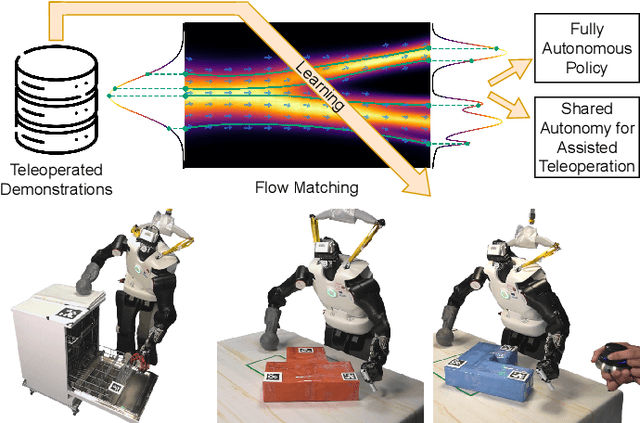
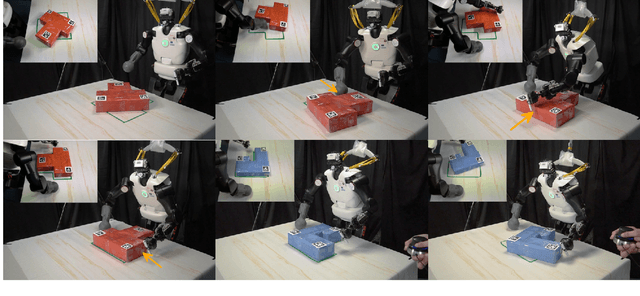
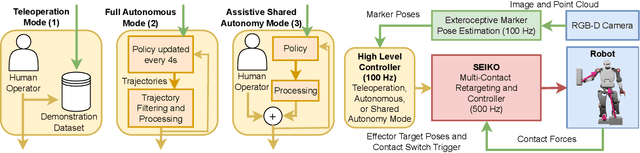
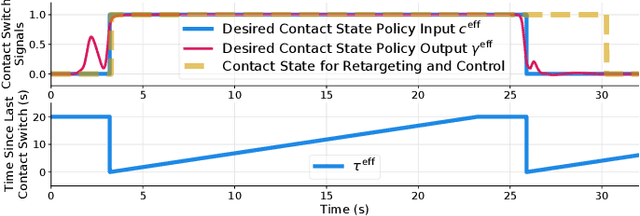
Humanoid robots could benefit from using their upper bodies for support contacts, enhancing their workspace, stability, and ability to perform contact-rich and pushing tasks. In this paper, we propose a unified approach that combines an optimization-based multi-contact whole-body controller with Flow Matching, a recently introduced method capable of generating multi-modal trajectory distributions for imitation learning. In simulation, we show that Flow Matching is more appropriate for robotics than Diffusion and traditional behavior cloning. On a real full-size humanoid robot (Talos), we demonstrate that our approach can learn a whole-body non-prehensile box-pushing task and that the robot can close dishwasher drawers by adding contacts with its free hand when needed for balance. We also introduce a shared autonomy mode for assisted teleoperation, providing automatic contact placement for tasks not covered in the demonstrations. Full experimental videos are available at: https://hucebot.github.io/flow_multisupport_website/
Word Ladders: A Mobile Application for Semantic Data Collection
Mar 29, 2024Word Ladders is a free mobile application for Android and iOS, developed for collecting linguistic data, specifically lists of words related to each other through semantic relations of categorical inclusion, within the Abstraction project (ERC-2021-STG-101039777). We hereby provide an overview of Word Ladders, explaining its game logic, motivation and expected results and applications to nlp tasks as well as to the investigation of cognitive scientific open questions