 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiverging Flows: Detecting Extrapolations in Conditional Generation
Feb 13, 2026The ability of Flow Matching (FM) to model complex conditional distributions has established it as the state-of-the-art for prediction tasks (e.g., robotics, weather forecasting). However, deployment in safety-critical settings is hindered by a critical extrapolation hazard: driven by smoothness biases, flow models yield plausible outputs even for off-manifold conditions, resulting in silent failures indistinguishable from valid predictions. In this work, we introduce Diverging Flows, a novel approach that enables a single model to simultaneously perform conditional generation and native extrapolation detection by structurally enforcing inefficient transport for off-manifold inputs. We evaluate our method on synthetic manifolds, cross-domain style transfer, and weather temperature forecasting, demonstrating that it achieves effective detection of extrapolations without compromising predictive fidelity or inference latency. These results establish Diverging Flows as a robust solution for trustworthy flow models, paving the way for reliable deployment in domains such as medicine, robotics, and climate science.
What Can Robots Teach Us About Trust and Reliance? An interdisciplinary dialogue between Social Sciences and Social Robotics
Jul 17, 2025As robots find their way into more and more aspects of everyday life, questions around trust are becoming increasingly important. What does it mean to trust a robot? And how should we think about trust in relationships that involve both humans and non-human agents? While the field of Human-Robot Interaction (HRI) has made trust a central topic, the concept is often approached in fragmented ways. At the same time, established work in sociology, where trust has long been a key theme, is rarely brought into conversation with developments in robotics. This article argues that we need a more interdisciplinary approach. By drawing on insights from both social sciences and social robotics, we explore how trust is shaped, tested and made visible. Our goal is to open up a dialogue between disciplines and help build a more grounded and adaptable framework for understanding trust in the evolving world of human-robot interaction.
Extremum Flow Matching for Offline Goal Conditioned Reinforcement Learning
May 26, 2025Imitation learning is a promising approach for enabling generalist capabilities in humanoid robots, but its scaling is fundamentally constrained by the scarcity of high-quality expert demonstrations. This limitation can be mitigated by leveraging suboptimal, open-ended play data, often easier to collect and offering greater diversity. This work builds upon recent advances in generative modeling, specifically Flow Matching, an alternative to Diffusion models. We introduce a method for estimating the extremum of the learned distribution by leveraging the unique properties of Flow Matching, namely, deterministic transport and support for arbitrary source distributions. We apply this method to develop several goal-conditioned imitation and reinforcement learning algorithms based on Flow Matching, where policies are conditioned on both current and goal observations. We explore and compare different architectural configurations by combining core components, such as critic, planner, actor, or world model, in various ways. We evaluated our agents on the OGBench benchmark and analyzed how different demonstration behaviors during data collection affect performance in a 2D non-prehensile pushing task. Furthermore, we validated our approach on real hardware by deploying it on the Talos humanoid robot to perform complex manipulation tasks based on high-dimensional image observations, featuring a sequence of pick-and-place and articulated object manipulation in a realistic kitchen environment. Experimental videos and code are available at: https://hucebot.github.io/extremum_flow_matching_website/
From Vocal Instructions to Household Tasks: The Inria Tiago++ in the euROBIN Service Robots Coopetition
Dec 20, 2024This paper describes the Inria team's integrated robotics system used in the 1st euROBIN coopetition, during which service robots performed voice-activated household tasks in a kitchen setting.The team developed a modified Tiago++ platform that leverages a whole-body control stack for autonomous and teleoperated modes, and an LLM-based pipeline for instruction understanding and task planning. The key contributions (opens-sourced) are the integration of these components and the design of custom teleoperation devices, addressing practical challenges in the deployment of service robots.
Words2Contact: Identifying Support Contacts from Verbal Instructions Using Foundation Models
Jul 19, 2024



This paper presents Words2Contact, a language-guided multi-contact placement pipeline leveraging large language models and vision language models. Our method is a key component for language-assisted teleoperation and human-robot cooperation, where human operators can instruct the robots where to place their support contacts before whole-body reaching or manipulation using natural language. Words2Contact transforms the verbal instructions of a human operator into contact placement predictions; it also deals with iterative corrections, until the human is satisfied with the contact location identified in the robot's field of view. We benchmark state-of-the-art LLMs and VLMs for size and performance in contact prediction. We demonstrate the effectiveness of the iterative correction process, showing that users, even naive, quickly learn how to instruct the system to obtain accurate locations. Finally, we validate Words2Contact in real-world experiments with the Talos humanoid robot, instructed by human operators to place support contacts on different locations and surfaces to avoid falling when reaching for distant objects.
Flow Matching Imitation Learning for Multi-Support Manipulation
Jul 17, 2024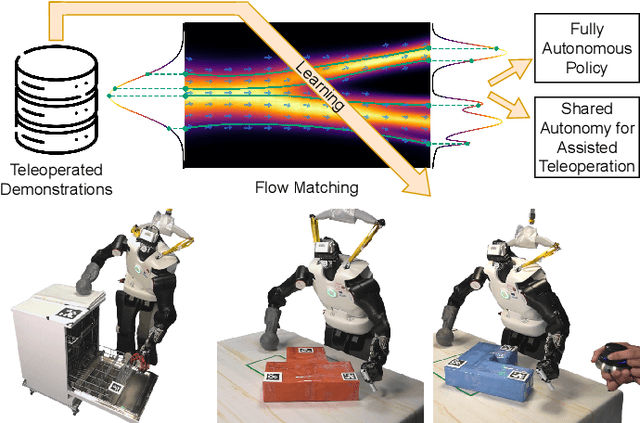
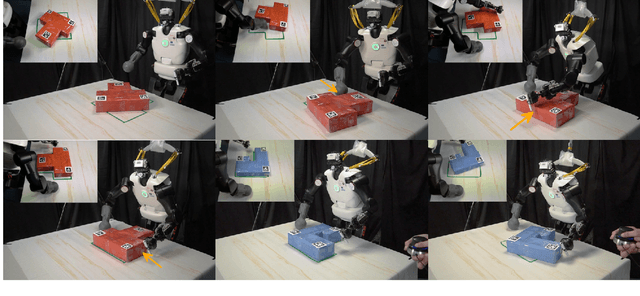
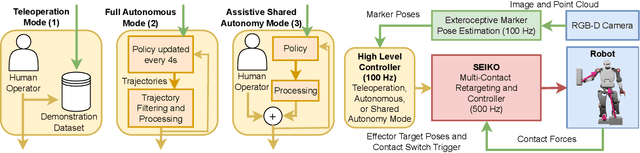
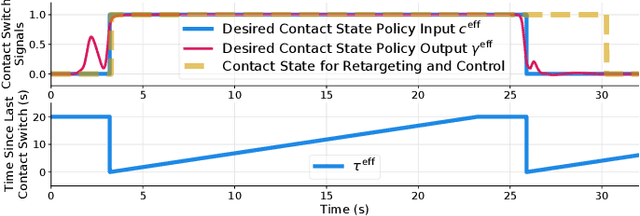
Humanoid robots could benefit from using their upper bodies for support contacts, enhancing their workspace, stability, and ability to perform contact-rich and pushing tasks. In this paper, we propose a unified approach that combines an optimization-based multi-contact whole-body controller with Flow Matching, a recently introduced method capable of generating multi-modal trajectory distributions for imitation learning. In simulation, we show that Flow Matching is more appropriate for robotics than Diffusion and traditional behavior cloning. On a real full-size humanoid robot (Talos), we demonstrate that our approach can learn a whole-body non-prehensile box-pushing task and that the robot can close dishwasher drawers by adding contacts with its free hand when needed for balance. We also introduce a shared autonomy mode for assisted teleoperation, providing automatic contact placement for tasks not covered in the demonstrations. Full experimental videos are available at: https://hucebot.github.io/flow_multisupport_website/
Multi-Contact Whole Body Force Control for Position-Controlled Robots
Jan 16, 2024Many humanoid and multi-legged robots are controlled in positions rather than in torques, preventing direct control of contact forces, and hampering their ability to create multiple contacts to enhance their balance, such as placing a hand on a wall or a handrail. This paper introduces the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) pipeline, drawing inspiration from flexibility models used in serial elastic actuators to indirectly control contact forces on traditional position-controlled robots. SEIKO formulates whole-body retargeting from Cartesian commands and admittance control using two quadratic programs solved in real time. We validated our pipeline with experiments on the real, full-scale humanoid robot Talos in various multicontact scenarios, including pushing tasks, far-reaching tasks, stair climbing, and stepping on sloped surfaces. This work opens the possibility of stable, contact-rich behaviors while getting around many of the challenges of torque-controlled robots. Code and videos are available at https://hucebot.github.io/seiko_controller_website/ .
Analysis and Perspectives on the ANA Avatar XPRIZE Competition
Jan 10, 2024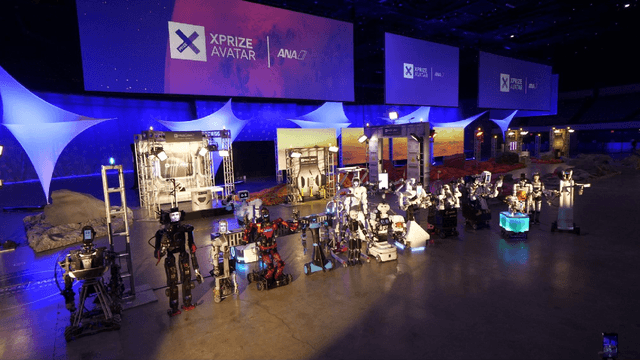
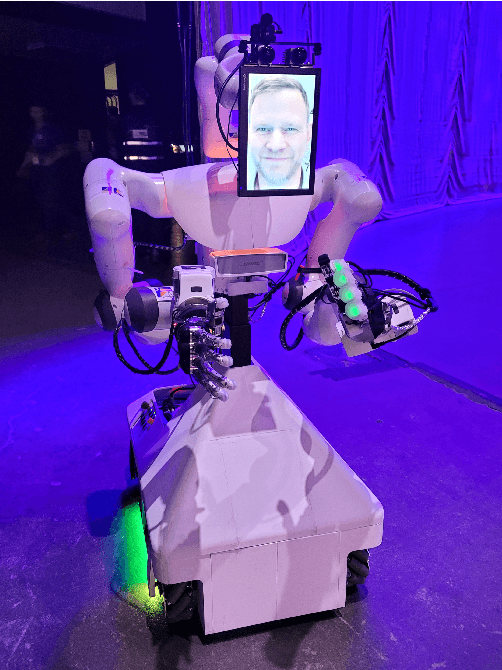
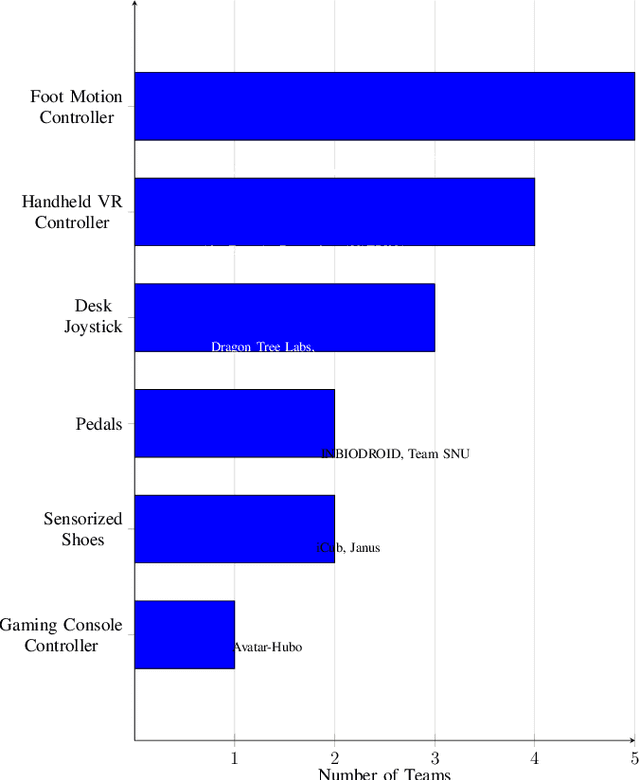
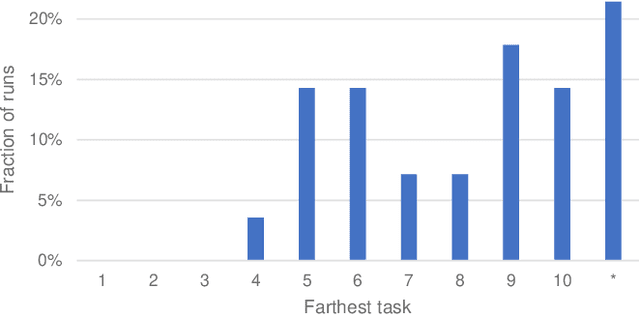
The ANA Avatar XPRIZE was a four-year competition to develop a robotic "avatar" system to allow a human operator to sense, communicate, and act in a remote environment as though physically present. The competition featured a unique requirement that judges would operate the avatars after less than one hour of training on the human-machine interfaces, and avatar systems were judged on both objective and subjective scoring metrics. This paper presents a unified summary and analysis of the competition from technical, judging, and organizational perspectives. We study the use of telerobotics technologies and innovations pursued by the competing teams in their avatar systems, and correlate the use of these technologies with judges' task performance and subjective survey ratings. It also summarizes perspectives from team leads, judges, and organizers about the competition's execution and impact to inform the future development of telerobotics and telepresence.
Feasibility Retargeting for Multi-contact Teleoperation and Physical Interaction
Aug 07, 2023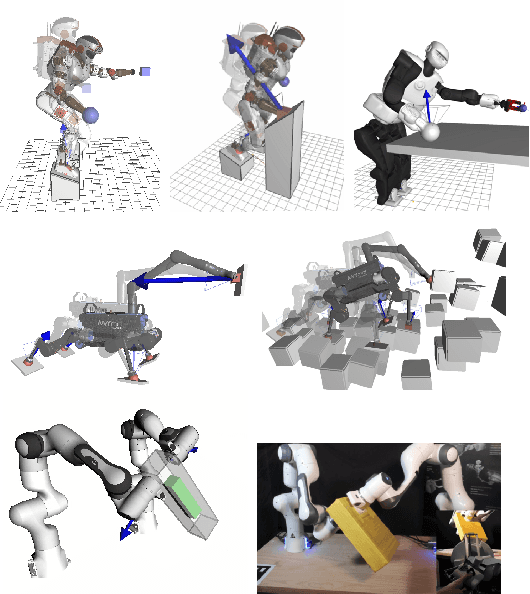



This short paper outlines two recent works on multi-contact teleoperation and the development of the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) framework. SEIKO adapts commands from the operator in real-time and ensures that the reference configuration sent to the underlying controller is feasible. Additionally, an admittance scheme is used to implement physical interaction, which is then combined with the operator's command and retargeted. SEIKO has been applied in simulations on various robots, including humanoid and quadruped robots designed for loco-manipulation. Furthermore, SEIKO has been tested on real hardware for bimanual heavy object carrying tasks.
Simultaneous Action Recognition and Human Whole-Body Motion and Dynamics Prediction from Wearable Sensors
Mar 14, 2023This paper presents a novel approach to solve simultaneously the problems of human activity recognition and whole-body motion and dynamics prediction for real-time applications. Starting from the dynamics of human motion and motor system theory, the notion of mixture of experts from deep learning has been extended to address this problem. In the proposed approach, experts are modelled as a sequence-to-sequence recurrent neural networks (RNN) architecture. Experiments show the results of 66-DoF real-world human motion prediction and action recognition during different tasks like walking and rotating. The code associated with this paper is available at: \url{github.com/ami-iit/paper_darvish_2022_humanoids_action-kindyn-predicition}