 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Vocal Instructions to Household Tasks: The Inria Tiago++ in the euROBIN Service Robots Coopetition
Dec 20, 2024This paper describes the Inria team's integrated robotics system used in the 1st euROBIN coopetition, during which service robots performed voice-activated household tasks in a kitchen setting.The team developed a modified Tiago++ platform that leverages a whole-body control stack for autonomous and teleoperated modes, and an LLM-based pipeline for instruction understanding and task planning. The key contributions (opens-sourced) are the integration of these components and the design of custom teleoperation devices, addressing practical challenges in the deployment of service robots.
Semantic-based Loco-Manipulation for Human-Robot Collaboration in Industrial Environments
Dec 22, 2023Robots with a high level of autonomy are increasingly requested by smart industries. A way to reduce the workers' stress and effort is to optimize the working environment by taking advantage of autonomous collaborative robots. A typical task for Human-Robot Collaboration (HRC) which improves the working setup in an industrial environment is the \textit{"bring me an object please"} where the user asks the collaborator to search for an object while he/she is focused on something else. As often happens, science fiction is ahead of the times, indeed, in the \textit{Iron Man} movie, the robot \textit{Dum-E} helps its creator, \textit{Tony Stark}, to create its famous armours. The ability of the robot to comprehend the semantics of the environment and engage with it is valuable for the human execution of more intricate tasks. In this work, we reproduce this operation to enable a mobile robot with manipulation and grasping capabilities to leverage its geometric and semantic understanding of the environment for the execution of the \textit{Bring Me} action, thereby assisting a worker autonomously. Results are provided to validate the proposed workflow in a simulated environment populated with objects and people. This framework aims to take a step forward in assistive robotics autonomy for industries and domestic environments.
Modeling and Numerical Analysis of Kangaroo Lower Body based on Constrained Dynamics of Hybrid Serial-Parallel Floating-Base Systems
Dec 07, 2023This paper presents the modeling and numerical analysis of the Kangaroo lower body prototype, a novel bipedal humanoid robot developed and manufactured by PAL Robotics. Kangaroo features high-power linear electric actuators combined with unique serial-parallel hybrid chains, which allow for the positioning of all the leg actuators near the base of the robot in order to improve the overall mass distribution. To model and analyze such complex nonlinear mechanisms, we employ a constrained formulation that is extended to account for floating-base systems in contact with the environment. A comparison is made to demonstrate the significant improvements achieved with TALOS, another humanoid bipedal robot designed by PAL Robotics, in terms of equivalent Cartesian inertia at the feet and centroidal angular momentum. Finally, the paper includes numerical experiments conducted through simulation and preliminary tests performed on the actual Kangaroo platform.
CARPE-ID: Continuously Adaptable Re-identification for Personalized Robot Assistance
Oct 30, 2023



In today's Human-Robot Interaction (HRI) scenarios, a prevailing tendency exists to assume that the robot shall cooperate with the closest individual or that the scene involves merely a singular human actor. However, in realistic scenarios, such as shop floor operations, such an assumption may not hold and personalized target recognition by the robot in crowded environments is required. To fulfil this requirement, in this work, we propose a person re-identification module based on continual visual adaptation techniques that ensure the robot's seamless cooperation with the appropriate individual even subject to varying visual appearances or partial or complete occlusions. We test the framework singularly using recorded videos in a laboratory environment and an HRI scenario, i.e., a person-following task by a mobile robot. The targets are asked to change their appearance during tracking and to disappear from the camera field of view to test the challenging cases of occlusion and outfit variations. We compare our framework with one of the state-of-the-art Multi-Object Tracking (MOT) methods and the results show that the CARPE-ID can accurately track each selected target throughout the experiments in all the cases (except two limit cases). At the same time, the s-o-t-a MOT has a mean of 4 tracking errors for each video.
Design and Validation of a Multi-Arm Relocatable Manipulator for Space Applications
Jan 24, 2023



This work presents the computational design and validation of the Multi-Arm Relocatable Manipulator (MARM), a three-limb robot for space applications, with particular reference to the MIRROR (i.e., the Multi-arm Installation Robot for Readying ORUs and Reflectors) use-case scenario as proposed by the European Space Agency. A holistic computational design and validation pipeline is proposed, with the aim of comparing different limb designs, as well as ensuring that valid limb candidates enable MARM to perform the complex loco-manipulation tasks required. Motivated by the task complexity in terms of kinematic reachability, (self)-collision avoidance, contact wrench limits, and motor torque limits affecting Earth experiments, this work leverages on multiple state-of-art planning and control approaches to aid the robot design and validation. These include sampling-based planning on manifolds, non-linear trajectory optimization, and quadratic programs for inverse dynamics computations with constraints. Finally, we present the attained MARM design and conduct preliminary tests for hardware validation through a set of lab experiments.
Prototyping fast and agile motions for legged robots with Horizon
Jun 17, 2022
For legged robots to perform agile, highly dynamic and contact-rich motions, whole-body trajectories computation of under-actuated complex systems subject to non-linear dynamics is required. In this work, we present hands-on applications of Horizon, a novel open-source framework for trajectory optimization tailored to robotic systems, that provides a collection of tools to simplify dynamic motion generation. Horizon was tested on a broad range of behaviours involving several robotic platforms: we introduce its building blocks and describe the complete procedure to generate three complex motions using its intuitive and straightforward API.
Loco-Manipulation Planning for Legged Robots: Offline and Online Strategies
May 20, 2022



The deployment of robots within realistic environments requires the capability to plan and refine the loco-manipulation trajectories on the fly to avoid unexpected interactions with a dynamic environment. This extended abstract provides a pipeline to offline plan a configuration space global trajectory based on a randomized strategy, and to online locally refine it depending on any change of the dynamic environment and the robot state. The offline planner directly plans in the contact space, and additionally seeks for whole-body feasible configurations compliant with the sampled contact states. The planned trajectory, made by a discrete set of contacts and configurations, can be seen as a graph and it can be online refined during the execution of the global trajectory. The online refinement is carried out by a graph optimization planner exploiting visual information. It locally acts on the global initial plan to account for possible changes in the environment. While the offline planner is a concluded work, tested on the humanoid COMAN+, the online local planner is still a work-in-progress which has been tested on a reduced model of the CENTAURO robot to avoid dynamic and static obstacles interfering with a wheeled motion task. Both the COMAN+ and the CENTAURO robots have been designed at the Italian Institute of Technology (IIT).
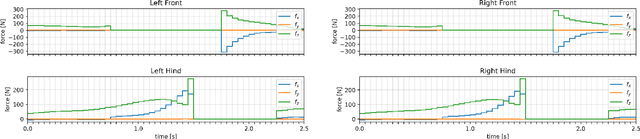
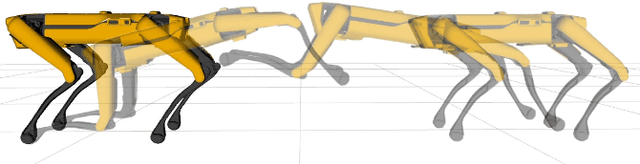
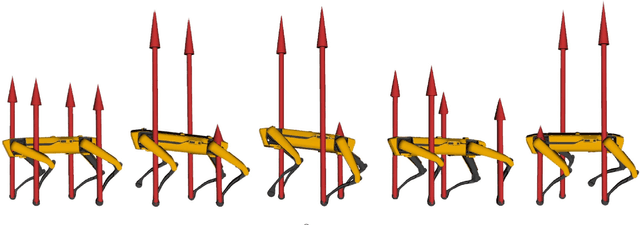
WoLF: the Whole-body Locomotion Framework for Quadruped Robots
May 13, 2022
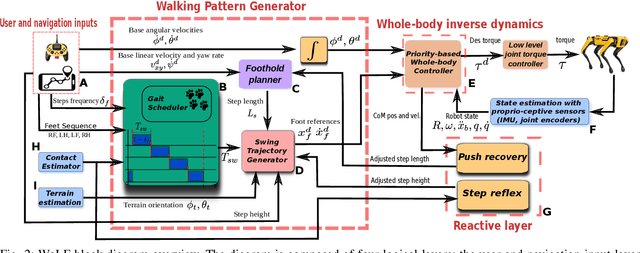
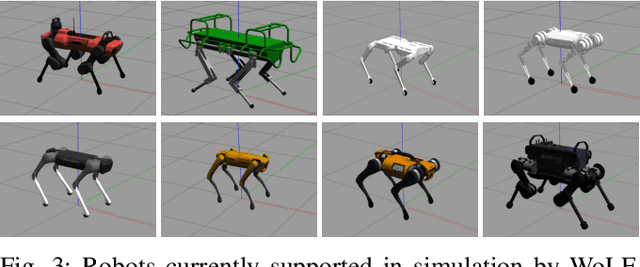
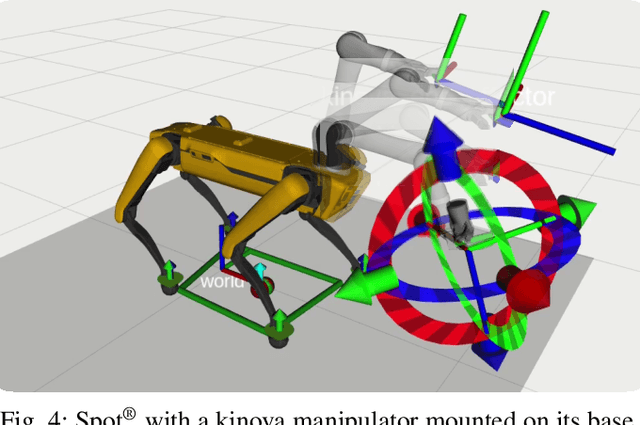
The Whole-Body Locomotion Framework (WoLF) is an end-to-end software suite devoted to the loco-manipulation of quadruped robots. WoLF abstracts the complexity of planning and control of quadrupedal robot hardware into a simple to use and robust software that can be connected through multiple tele-operation devices to different quadruped robot models. Furthermore, WoLF allows controlling mounted devices, such as arms or pan-tilt cameras, jointly with the quadrupedal platform. In this short paper, we introduce the main features of WoLF and its overall software architecture.
Optimization-Based Quadrupedal Hybrid Wheeled-Legged Locomotion
Jul 15, 2021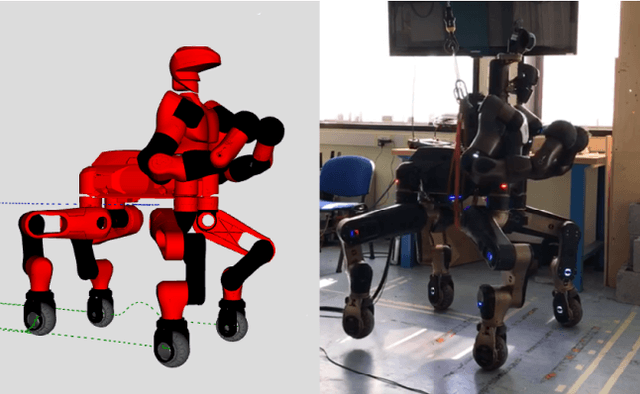
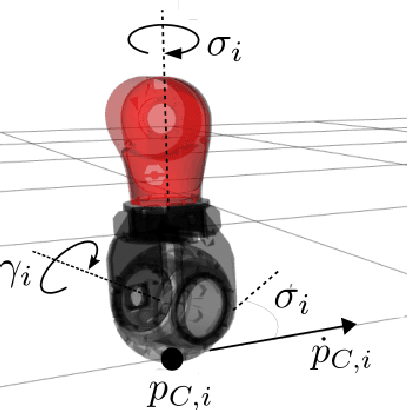
Hybrid wheeled-legged locomotion is a navigation paradigm only recently opened up by novel robotic designs,e.g. the centaur-type humanoid CENTAURO [1] or the quadruped ANYmal [2] in its configuration featuring non-steerable wheels. The term Hybrid Locomotion is hereafter used to indicate a particular type of locomotion, achieved with simultaneous and coordinate use of legs and wheels,see Fig. 1. Such choice stems at the intersection between legged locomotion and the simpler wheeled navigation, in order to get the best from both techniques: agility and ability to traverse uneven terrains from the first, speed and stability from the second. As a consequence, the problem of planning feasible trajectories for a hybrid robot shares many similarities with the legged locomotion problem: also in the hybrid case the motion of the base is reached through contact of the feet with the environment, taking into account that the wheeled feet can just push on the ground and not pull it. Forces compatible with friction cones have to be considered, while the contacts can slide just along the direction prescribed by the orientation of the wheels.
Agile Actions with a Centaur-Type Humanoid: A Decoupled Approach
Mar 12, 2021
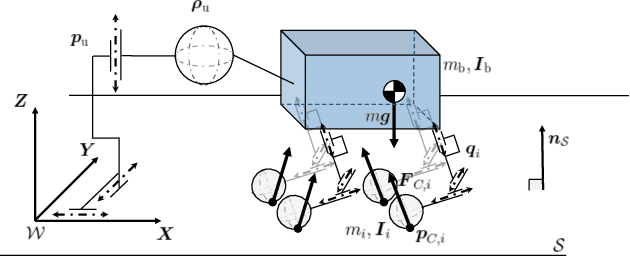
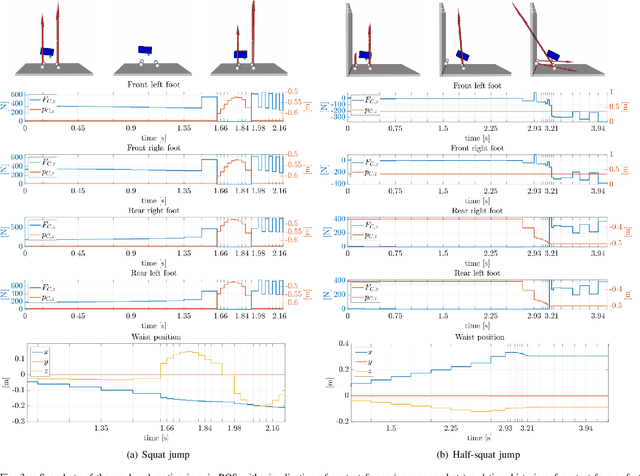
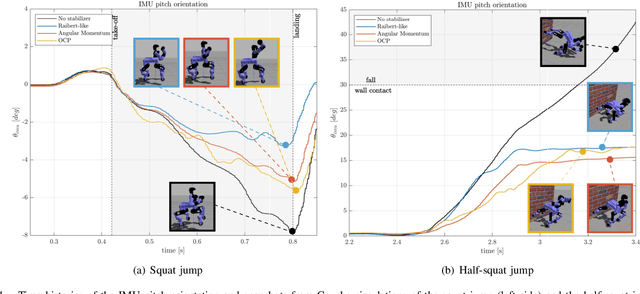
The kinematic features of a centaur-type humanoid platform, combined with a powerful actuation, enable the experimentation of a variety of agile and dynamic motions. However, the higher number of degrees-of-freedom and the increased weight of the system, compared to the bipedal and quadrupedal counterparts, pose significant research challenges in terms of computational load and real implementation. To this end, this work presents a control architecture to perform agile actions, conceived for torque-controlled platforms, which decouples for computational purposes offline optimal control planning of lower-body primitives, based on a template kinematic model, and online control of the upper-body motion to maintain balance. Three stabilizing strategies are presented, whose performance is compared in two types of simulated jumps, while experimental validation is performed on a half-squat jump using the CENTAURO robot.