 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Validation of a Multi-Arm Relocatable Manipulator for Space Applications
Jan 24, 2023



This work presents the computational design and validation of the Multi-Arm Relocatable Manipulator (MARM), a three-limb robot for space applications, with particular reference to the MIRROR (i.e., the Multi-arm Installation Robot for Readying ORUs and Reflectors) use-case scenario as proposed by the European Space Agency. A holistic computational design and validation pipeline is proposed, with the aim of comparing different limb designs, as well as ensuring that valid limb candidates enable MARM to perform the complex loco-manipulation tasks required. Motivated by the task complexity in terms of kinematic reachability, (self)-collision avoidance, contact wrench limits, and motor torque limits affecting Earth experiments, this work leverages on multiple state-of-art planning and control approaches to aid the robot design and validation. These include sampling-based planning on manifolds, non-linear trajectory optimization, and quadratic programs for inverse dynamics computations with constraints. Finally, we present the attained MARM design and conduct preliminary tests for hardware validation through a set of lab experiments.
Flexible Disaster Response of Tomorrow -- Final Presentation and Evaluation of the CENTAURO System
Sep 19, 2019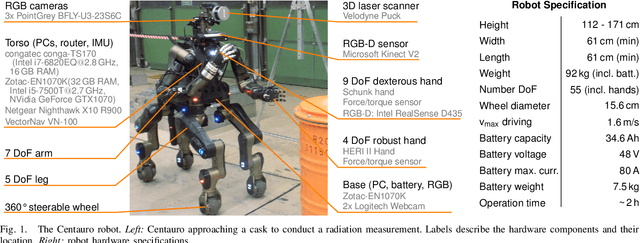
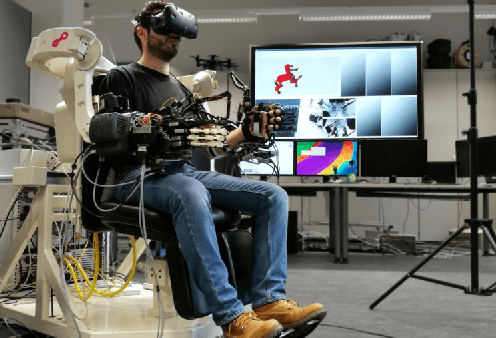
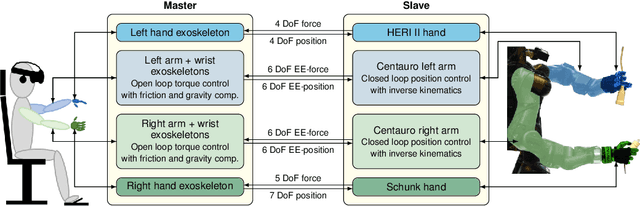
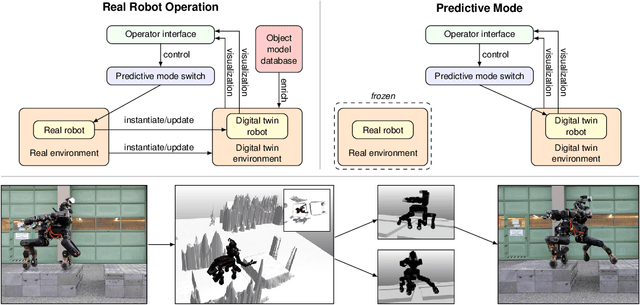
Mobile manipulation robots have high potential to support rescue forces in disaster-response missions. Despite the difficulties imposed by real-world scenarios, robots are promising to perform mission tasks from a safe distance. In the CENTAURO project, we developed a disaster-response system which consists of the highly flexible Centauro robot and suitable control interfaces including an immersive tele-presence suit and support-operator controls on different levels of autonomy. In this article, we give an overview of the final CENTAURO system. In particular, we explain several high-level design decisions and how those were derived from requirements and extensive experience of Kerntechnische Hilfsdienst GmbH, Karlsruhe, Germany (KHG). We focus on components which were recently integrated and report about a systematic evaluation which demonstrated system capabilities and revealed valuable insights.