 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Recover: Dynamic Reward Shaping with Wheel-Leg Coordination for Fallen Robots
Jun 05, 2025Adaptive recovery from fall incidents are essential skills for the practical deployment of wheeled-legged robots, which uniquely combine the agility of legs with the speed of wheels for rapid recovery. However, traditional methods relying on preplanned recovery motions, simplified dynamics or sparse rewards often fail to produce robust recovery policies. This paper presents a learning-based framework integrating Episode-based Dynamic Reward Shaping and curriculum learning, which dynamically balances exploration of diverse recovery maneuvers with precise posture refinement. An asymmetric actor-critic architecture accelerates training by leveraging privileged information in simulation, while noise-injected observations enhance robustness against uncertainties. We further demonstrate that synergistic wheel-leg coordination reduces joint torque consumption by 15.8% and 26.2% and improves stabilization through energy transfer mechanisms. Extensive evaluations on two distinct quadruped platforms achieve recovery success rates up to 99.1% and 97.8% without platform-specific tuning. The supplementary material is available at https://boyuandeng.github.io/L2R-WheelLegCoordination/
CONCERT: a Modular Reconfigurable Robot for Construction
Apr 07, 2025This paper presents CONCERT, a fully reconfigurable modular collaborative robot (cobot) for multiple on-site operations in a construction site. CONCERT has been designed to support human activities in construction sites by leveraging two main characteristics: high-power density motors and modularity. In this way, the robot is able to perform a wide range of highly demanding tasks by acting as a co-worker of the human operator or by autonomously executing them following user instructions. Most of its versatility comes from the possibility of rapidly changing its kinematic structure by adding or removing passive or active modules. In this way, the robot can be set up in a vast set of morphologies, consequently changing its workspace and capabilities depending on the task to be executed. In the same way, distal end-effectors can be replaced for the execution of different operations. This paper also includes a full description of the software pipeline employed to automatically discover and deploy the robot morphology. Specifically, depending on the modules installed, the robot updates the kinematic, dynamic, and geometric parameters, taking into account the information embedded in each module. In this way, we demonstrate how the robot can be fully reassembled and made operational in less than ten minutes. We validated the CONCERT robot across different use cases, including drilling, sanding, plastering, and collaborative transportation with obstacle avoidance, all performed in a real construction site scenario. We demonstrated the robot's adaptivity and performance in multiple scenarios characterized by different requirements in terms of power and workspace. CONCERT has been designed and built by the Humanoid and Human-Centered Mechatronics Laboratory (HHCM) at the Istituto Italiano di Tecnologia in the context of the European Project Horizon 2020 CONCERT.
Soft Adaptive Feet for Legged Robots: An Open-Source Model for Locomotion Simulation
Dec 04, 2024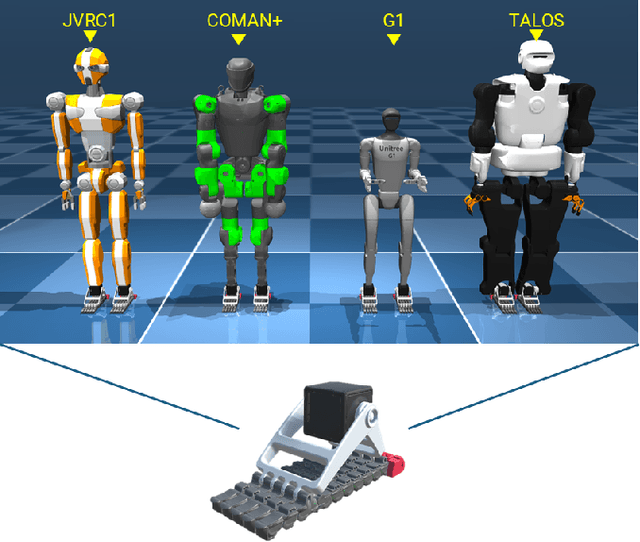
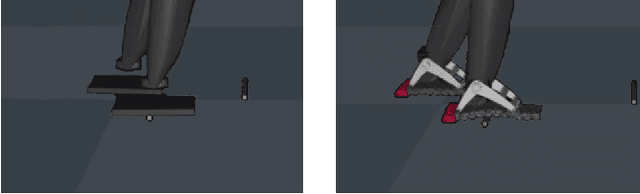
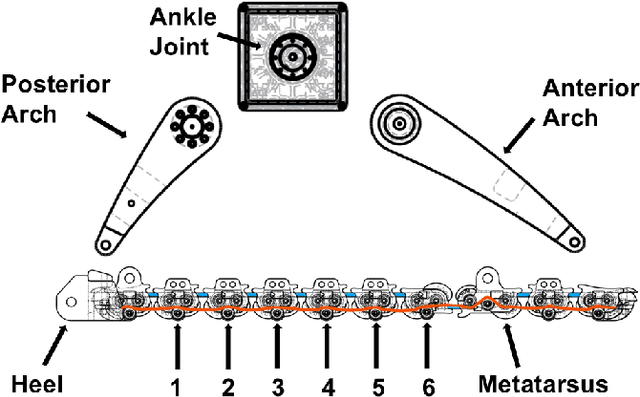
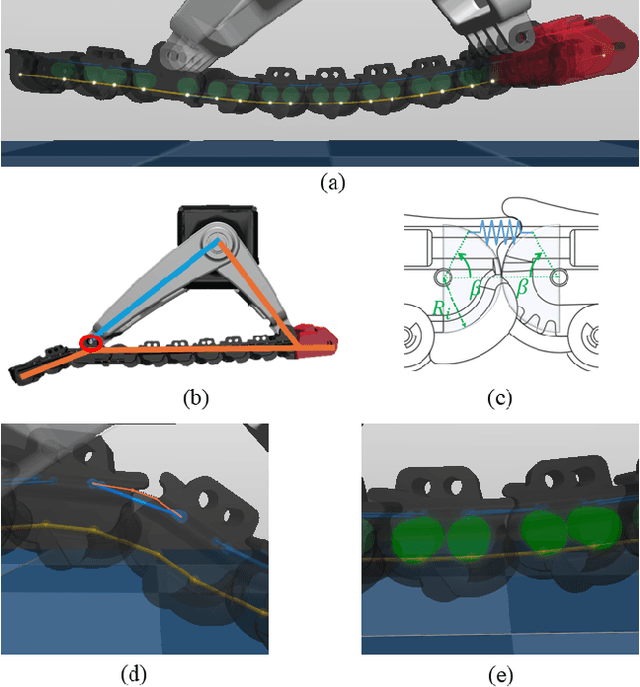
In recent years, artificial feet based on soft robotics and under-actuation principles emerged to improve mobility on challenging terrains. This paper presents the application of the MuJoCo physics engine to realize a digital twin of an adaptive soft foot developed for use with legged robots. We release the MuJoCo soft foot digital twin as open source to allow users and researchers to explore new approaches to locomotion. The work includes the system modeling techniques along with the kinematic and dynamic attributes involved. Validation is conducted through a rigorous comparison with bench tests on a physical prototype, replicating these experiments in simulation. Results are evaluated based on sole deformation and contact forces during foot-obstacle interaction. The foot model is subsequently integrated into simulations of the humanoid robot COMAN+, replacing its original flat feet. Results show an improvement in the robot's ability to negotiate small obstacles without altering its control strategy. Ultimately, this study offers a comprehensive modeling approach for adaptive soft feet, supported by qualitative comparisons of bipedal locomotion with state of the art robotic feet.
HYPERmotion: Learning Hybrid Behavior Planning for Autonomous Loco-manipulation
Jun 20, 2024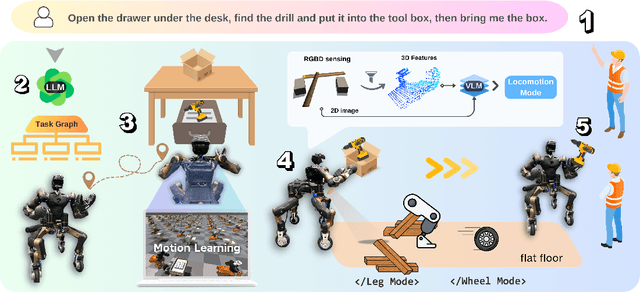
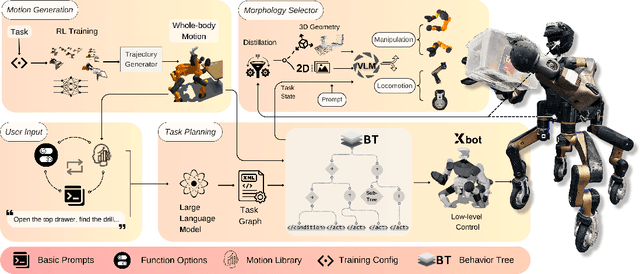
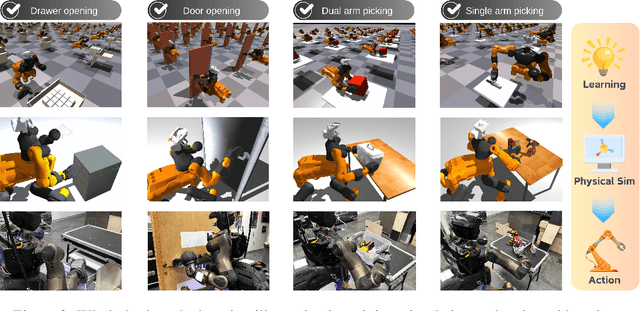
Enabling robots to autonomously perform hybrid motions in diverse environments can be beneficial for long-horizon tasks such as material handling, household chores, and work assistance. This requires extensive exploitation of intrinsic motion capabilities, extraction of affordances from rich environmental information, and planning of physical interaction behaviors. Despite recent progress has demonstrated impressive humanoid whole-body control abilities, they struggle to achieve versatility and adaptability for new tasks. In this work, we propose HYPERmotion, a framework that learns, selects and plans behaviors based on tasks in different scenarios. We combine reinforcement learning with whole-body optimization to generate motion for 38 actuated joints and create a motion library to store the learned skills. We apply the planning and reasoning features of the large language models (LLMs) to complex loco-manipulation tasks, constructing a hierarchical task graph that comprises a series of primitive behaviors to bridge lower-level execution with higher-level planning. By leveraging the interaction of distilled spatial geometry and 2D observation with a visual language model (VLM) to ground knowledge into a robotic morphology selector to choose appropriate actions in single- or dual-arm, legged or wheeled locomotion. Experiments in simulation and real-world show that learned motions can efficiently adapt to new tasks, demonstrating high autonomy from free-text commands in unstructured scenes. Videos and website: hy-motion.github.io/
Design and Validation of a Multi-Arm Relocatable Manipulator for Space Applications
Jan 24, 2023



This work presents the computational design and validation of the Multi-Arm Relocatable Manipulator (MARM), a three-limb robot for space applications, with particular reference to the MIRROR (i.e., the Multi-arm Installation Robot for Readying ORUs and Reflectors) use-case scenario as proposed by the European Space Agency. A holistic computational design and validation pipeline is proposed, with the aim of comparing different limb designs, as well as ensuring that valid limb candidates enable MARM to perform the complex loco-manipulation tasks required. Motivated by the task complexity in terms of kinematic reachability, (self)-collision avoidance, contact wrench limits, and motor torque limits affecting Earth experiments, this work leverages on multiple state-of-art planning and control approaches to aid the robot design and validation. These include sampling-based planning on manifolds, non-linear trajectory optimization, and quadratic programs for inverse dynamics computations with constraints. Finally, we present the attained MARM design and conduct preliminary tests for hardware validation through a set of lab experiments.
Loco-Manipulation Planning for Legged Robots: Offline and Online Strategies
May 20, 2022



The deployment of robots within realistic environments requires the capability to plan and refine the loco-manipulation trajectories on the fly to avoid unexpected interactions with a dynamic environment. This extended abstract provides a pipeline to offline plan a configuration space global trajectory based on a randomized strategy, and to online locally refine it depending on any change of the dynamic environment and the robot state. The offline planner directly plans in the contact space, and additionally seeks for whole-body feasible configurations compliant with the sampled contact states. The planned trajectory, made by a discrete set of contacts and configurations, can be seen as a graph and it can be online refined during the execution of the global trajectory. The online refinement is carried out by a graph optimization planner exploiting visual information. It locally acts on the global initial plan to account for possible changes in the environment. While the offline planner is a concluded work, tested on the humanoid COMAN+, the online local planner is still a work-in-progress which has been tested on a reduced model of the CENTAURO robot to avoid dynamic and static obstacles interfering with a wheeled motion task. Both the COMAN+ and the CENTAURO robots have been designed at the Italian Institute of Technology (IIT).
Inference in Bayesian Additive Vector Autoregressive Tree Models
Jun 29, 2020
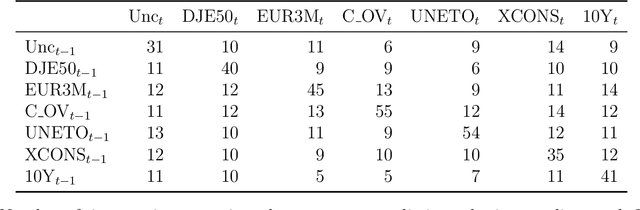

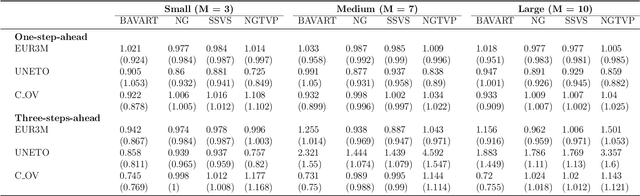
Vector autoregressive (VAR) models assume linearity between the endogenous variables and their lags. This linearity assumption might be overly restrictive and could have a deleterious impact on forecasting accuracy. As a solution, we propose combining VAR with Bayesian additive regression tree (BART) models. The resulting Bayesian additive vector autoregressive tree (BAVART) model is capable of capturing arbitrary non-linear relations between the endogenous variables and the covariates without much input from the researcher. Since controlling for heteroscedasticity is key for producing precise density forecasts, our model allows for stochastic volatility in the errors. Using synthetic and real data, we demonstrate the advantages of our methods. For Eurozone data, we show that our nonparametric approach improves upon commonly used forecasting models and that it produces impulse responses to an uncertainty shock that are consistent with established findings in the literature.