 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Agonist-Antagonist Coupling in the Absence of Mechanical Coupling after Targeted Muscle Reinnervation
Jan 23, 2026Following limb amputation and targeted muscle reinnervation (TMR), nerves supplying agonist and antagonist muscles are rerouted into separate targeted muscles, disrupting natural neuromechanical coupling between muscle groups. Using high-density intramuscular microelectrode arrays in reinnervated muscles, we show that neural signals for agonist and antagonist tasks remain functionally coupled: motor units active during agonist tasks were also recruited during corresponding antagonist tasks, despite no visual feedback on coactivation being provided.
A General Control Method for Human-Robot Integration
Dec 19, 2024



This paper introduces a new generalized control method designed for multi-degrees-of-freedom devices to help people with limited motion capabilities in their daily activities. The challenge lies in finding the most adapted strategy for the control interface to effectively map user's motions in a low-dimensional space to complex robotic assistive devices, such as prostheses, supernumerary limbs, up to remote robotic avatars. The goal is a system which integrates the human and the robotic parts into a unique system, moving so as to reach the targets decided by the human while autonomously reducing the user's effort and discomfort. We present a framework to control general multi DoFs assistive systems, which translates user-performed compensatory motions into the necessary robot commands for reaching targets while canceling or reducing compensation. The framework extends to prostheses of any number of DoF up to full robotic avatars, regarded here as a sort of whole-body prosthesis of the person who sees the robot as an artificial extension of their own body without a physical link but with a sensory-motor integration. We have validated and applied this control strategy through tests encompassing simulated scenarios and real-world trials involving a virtual twin of the robotic parts (prosthesis and robot) and a physical humanoid avatar.
Design, Characterization, and Validation of a Variable Stiffness Prosthetic Elbow
Dec 05, 2024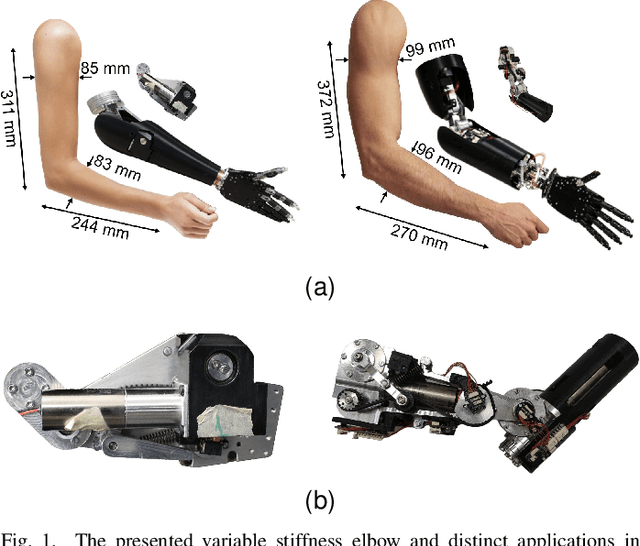
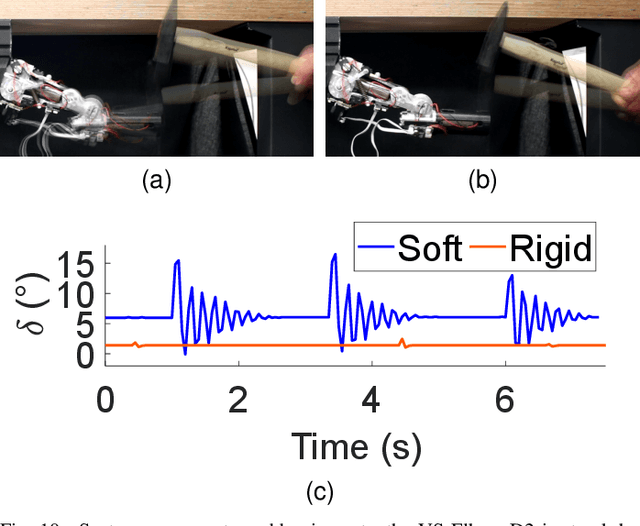
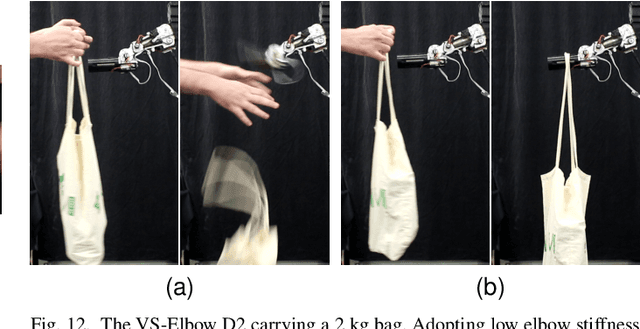
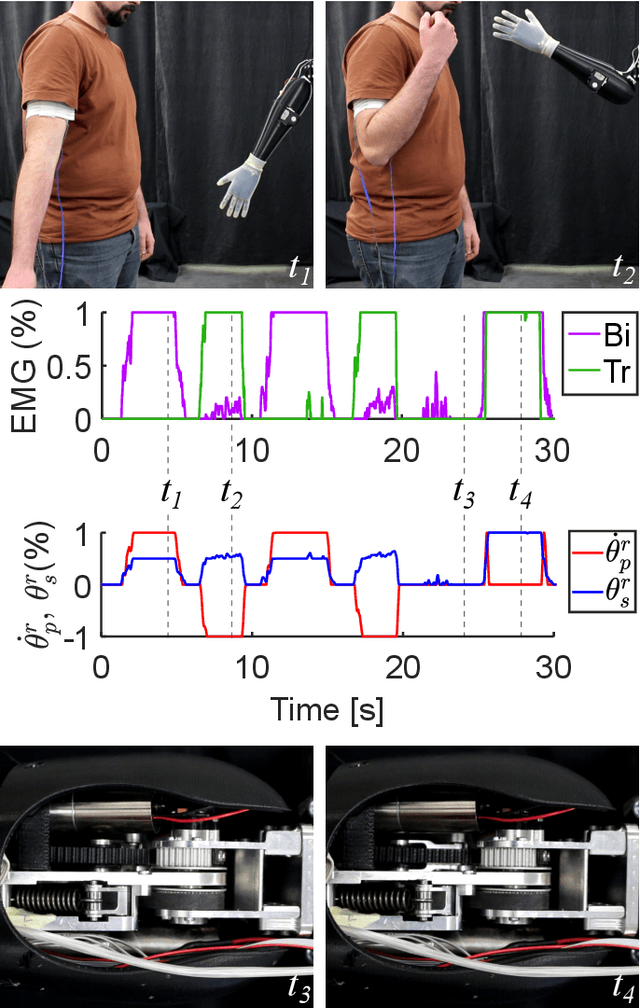
Intuitively, prostheses with user-controllable stiffness could mimic the intrinsic behavior of the human musculoskeletal system, promoting safe and natural interactions and task adaptability in real-world scenarios. However, prosthetic design often disregards compliance because of the additional complexity, weight, and needed control channels. This paper focuses on designing a Variable Stiffness Actuator (VSA) with weight, size, and performance compatible with prosthetic applications, addressing its implementation for the elbow joint. While a direct biomimetic approach suggests adopting an Agonist-Antagonist (AA) layout to replicate the biceps and triceps brachii with elastic actuation, this solution is not optimal to accommodate the varied morphologies of residual limbs. Instead, we employed the AA layout to craft an elbow prosthesis fully contained in the user's forearm, catering to individuals with distal transhumeral amputations. Additionally, we introduce a variant of this design where the two motors are split in the upper arm and forearm to distribute mass and volume more evenly along the bionic limb, enhancing comfort for patients with more proximal amputation levels. We characterize and validate our approach, demonstrating that both architectures meet the target requirements for an elbow prosthesis. The system attains the desired 120{\deg} range of motion, achieves the target stiffness range of [2, 60] Nm/rad, and can actively lift up to 3 kg. Our novel design reduces weight by up to 50% compared to existing VSAs for elbow prostheses while achieving performance comparable to the state of the art. Case studies suggest that passive and variable compliance could enable robust and safe interactions and task adaptability in the real world.
* This article has been accepted for publication in IEEE Transactions on Robotics. This is the author's version which has not been fully edited and content may change prior to final publication. Citation information: DOI 10.1109/TRO.2024.3492372
Soft Adaptive Feet for Legged Robots: An Open-Source Model for Locomotion Simulation
Dec 04, 2024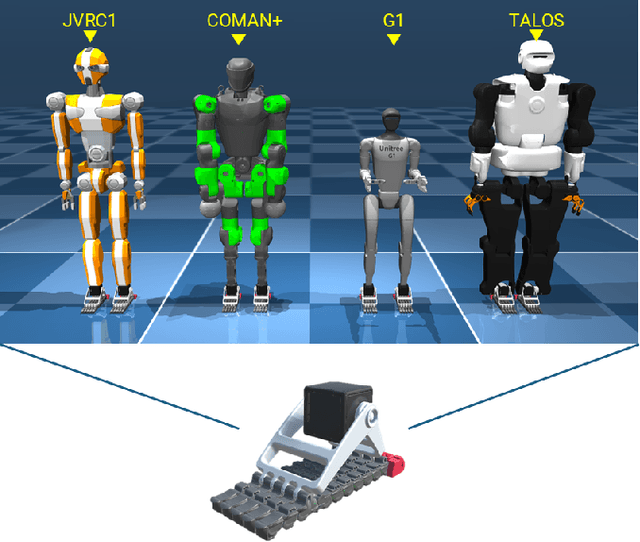
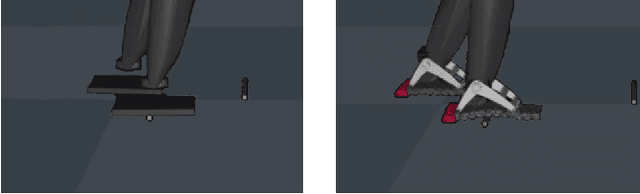
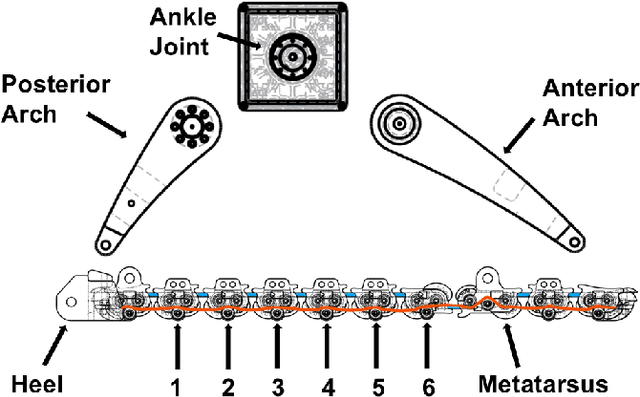
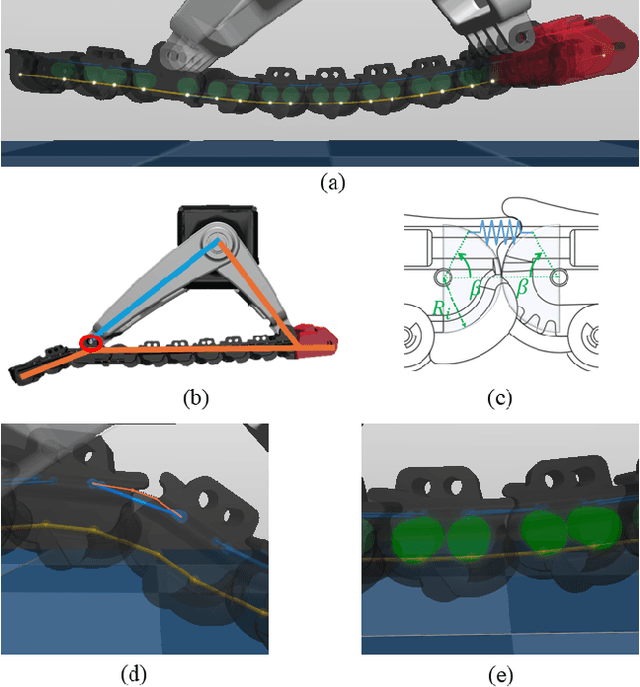
In recent years, artificial feet based on soft robotics and under-actuation principles emerged to improve mobility on challenging terrains. This paper presents the application of the MuJoCo physics engine to realize a digital twin of an adaptive soft foot developed for use with legged robots. We release the MuJoCo soft foot digital twin as open source to allow users and researchers to explore new approaches to locomotion. The work includes the system modeling techniques along with the kinematic and dynamic attributes involved. Validation is conducted through a rigorous comparison with bench tests on a physical prototype, replicating these experiments in simulation. Results are evaluated based on sole deformation and contact forces during foot-obstacle interaction. The foot model is subsequently integrated into simulations of the humanoid robot COMAN+, replacing its original flat feet. Results show an improvement in the robot's ability to negotiate small obstacles without altering its control strategy. Ultimately, this study offers a comprehensive modeling approach for adaptive soft feet, supported by qualitative comparisons of bipedal locomotion with state of the art robotic feet.
Characterization, Experimental Validation and Pilot User Study of the Vibro-Inertial Bionic Enhancement System (VIBES)
Aug 22, 2024



This study presents the characterization and validation of the VIBES, a wearable vibrotactile device that provides high-frequency tactile information embedded in a prosthetic socket. A psychophysical characterization involving ten able-bodied participants is performed to compute the Just Noticeable Difference (JND) related to the discrimination of vibrotactile cues delivered on the skin in two forearm positions, with the goal of optimising vibrotactile actuator position to maximise perceptual response. Furthermore, system performance is validated and tested both with ten able-bodied participants and one prosthesis user considering three tasks. More specifically, in the Active Texture Identification, Slippage and Fragile Object Experiments, we investigate if the VIBES could enhance users' roughness discrimination and manual usability and dexterity. Finally, we test the effect of the vibrotactile system on prosthetic embodiment in a Rubber Hand Illusion (RHI) task. Results show the system's effectiveness in conveying contact and texture cues, making it a potential tool to restore sensory feedback and enhance the embodiment in prosthetic users.
Tactile Perception in Upper Limb Prostheses: Mechanical Characterization, Human Experiments, and Computational Findings
Feb 20, 2024



Our research investigates vibrotactile perception in four prosthetic hands with distinct kinematics and mechanical characteristics. We found that rigid and simple socket-based prosthetic devices can transmit tactile information and surprisingly enable users to identify the stimulated finger with high reliability. This ability decreases with more advanced prosthetic hands with additional articulations and softer mechanics. We conducted experiments to understand the underlying mechanisms. We assessed a prosthetic user's ability to discriminate finger contacts based on vibrations transmitted through the four prosthetic hands. We also performed numerical and mechanical vibration tests on the prostheses and used a machine learning classifier to identify the contacted finger. Our results show that simpler and rigid prosthetic hands facilitate contact discrimination (for instance, a user of a purely cosmetic hand can distinguish a contact on the index finger from other fingers with 83% accuracy), but all tested hands, including soft advanced ones, performed above chance level. Despite advanced hands reducing vibration transmission, a machine learning algorithm still exceeded human performance in discriminating finger contacts. These findings suggest the potential for enhancing vibrotactile feedback in advanced prosthetic hands and lay the groundwork for future integration of such feedback in prosthetic devices.
Investigating the Performance of Soft Robotic Adaptive Feet with Longitudinal and Transverse Arches
Jan 24, 2024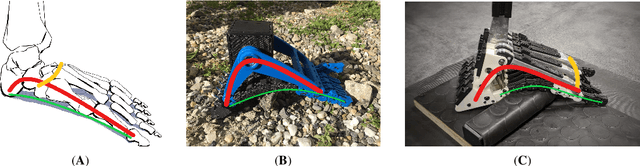
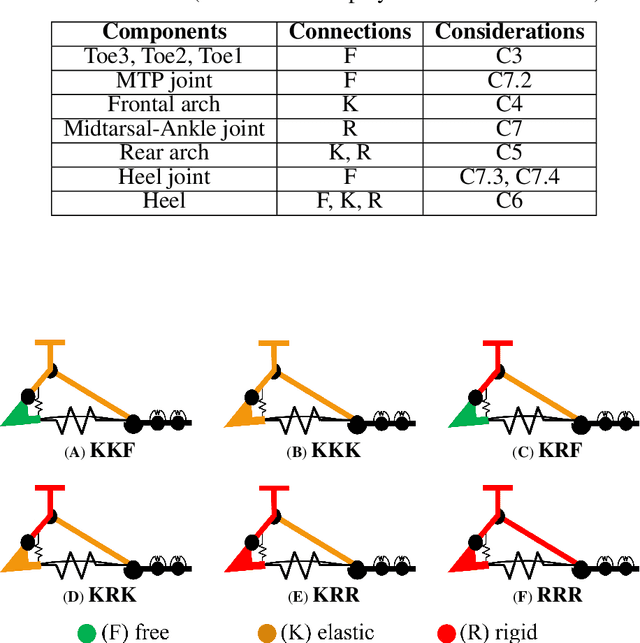
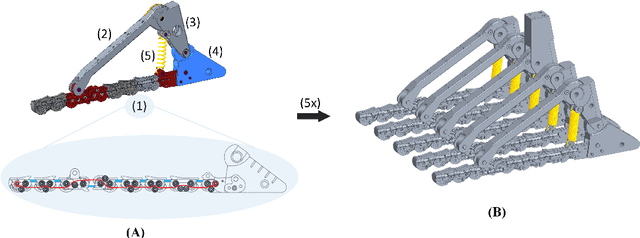
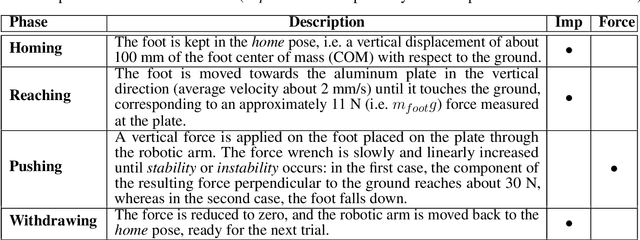
Biped robots usually adopt feet with a rigid structure that simplifies walking on flat grounds and yet hinders ground adaptation in unstructured environments, thus jeopardizing stability. We recently explored in the SoftFoot the idea of adapting a robotic foot to ground irregularities along the sagittal plane. Building on the previous results, we propose in this paper a novel robotic foot able to adapt both in the sagittal and frontal planes, similarly to the human foot. It features five parallel modules with intrinsic longitudinal adaptability that can be combined in many possible designs through optional rigid or elastic connections. By following a methodological design approach, we narrow down the design space to five candidate foot designs and implement them on a modular system. Prototypes are tested experimentally via controlled application of force, through a robotic arm, onto a sensorized plate endowed with different obstacles. Their performance is compared, using also a rigid foot and the previous SoftFoot as a baseline. Analysis of footprint stability shows that the introduction of the transverse arch, by elastically connecting the five parallel modules, is advantageous for obstacle negotiation, especially when obstacles are located under the forefoot. In addition to biped robots' locomotion, this finding might also benefit lower-limb prostheses design.
Analytical Model and Experimental Testing of the SoftFoot: an Adaptive Robot Foot for Walking over Obstacles and Irregular Terrains
Jan 10, 2024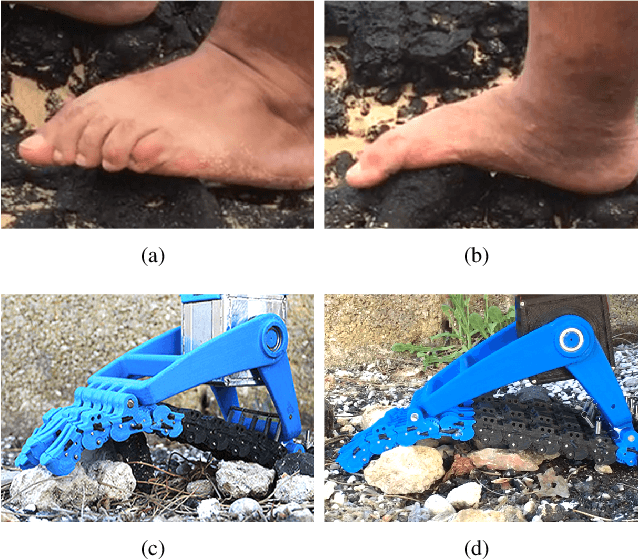
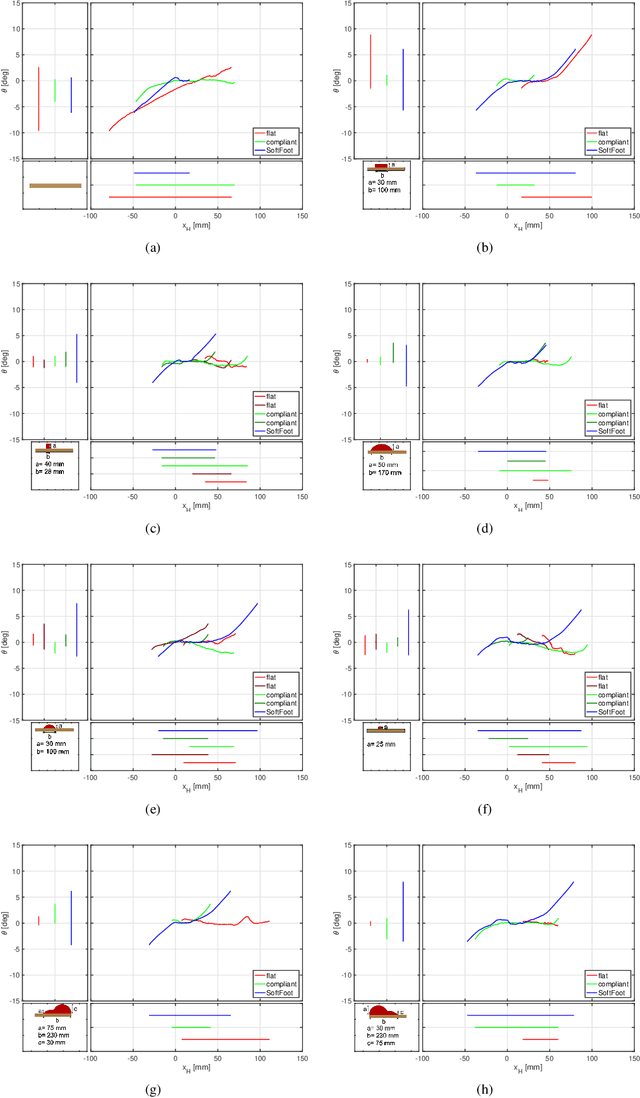
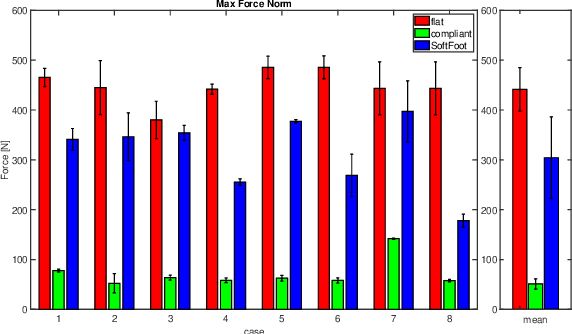
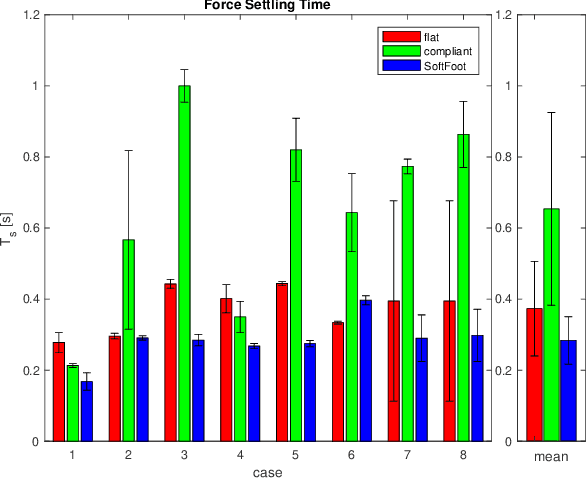
Robot feet are crucial for maintaining dynamic stability and propelling the body during walking, especially on uneven terrains. Traditionally, robot feet were mostly designed as flat and stiff pieces of metal, which meets its limitations when the robot is required to step on irregular grounds, e.g. stones. While one could think that adding compliance under such feet would solve the problem, this is not the case. To address this problem, we introduced the SoftFoot, an adaptive foot design that can enhance walking performance over irregular grounds. The proposed design is completely passive and varies its shape and stiffness based on the exerted forces, through a system of pulley, tendons, and springs opportunely placed in the structure. This paper outlines the motivation behind the SoftFoot and describes the theoretical model which led to its final design. The proposed system has been experimentally tested and compared with two analogous conventional feet, a rigid one and a compliant one, with similar footprints and soles. The experimental validation focuses on the analysis of the standing performance, measured in terms of the equivalent support surface extension and the compensatory ankle angle, and the rejection of impulsive forces, which is important in events such as stepping on unforeseen obstacles. Results show that the SoftFoot has the largest equivalent support surface when standing on obstacles, and absorbs impulsive loads in a way almost as good as a compliant foot.
EMG-based Control Strategies of a Supernumerary Robotic Hand for the Rehabilitation of Sub-Acute Stroke Patients: Proof of Concept
Dec 20, 2023



One of the most frequent and severe aftermaths of a stroke is the loss of upper limb functionality. Therapy started in the sub-acute phase proved more effective, mainly when the patient participates actively. Recently, a novel set of rehabilitation and support robotic devices, known as supernumerary robotic limbs, have been introduced. This work investigates how a surface electromyography (sEMG) based control strategy would improve their usability in rehabilitation, limited so far by input interfaces requiring to subjects some level of residual mobility. After briefly introducing the phenomena hindering post-stroke sEMG and its use to control robotic hands, we describe a framework to acquire and interpret muscle signals of the forearm extensors. We applied it to drive a supernumerary robotic limb, the SoftHand-X, to provide Task-Specific Training (TST) in patients with sub-acute stroke. We propose and describe two algorithms to control the opening and closing of the robotic hand, with different levels of user agency and therapist control. We experimentally tested the feasibility of the proposed approach on four patients, followed by a therapist, to check their ability to operate the hand. The promising preliminary results indicate sEMG-based control as a viable solution to extend TST to sub-acute post-stroke patients.
* 7 pages, 5 figures
VIBES: Vibro-Inertial Bionic Enhancement System in a Prosthetic Socket
Dec 20, 2023
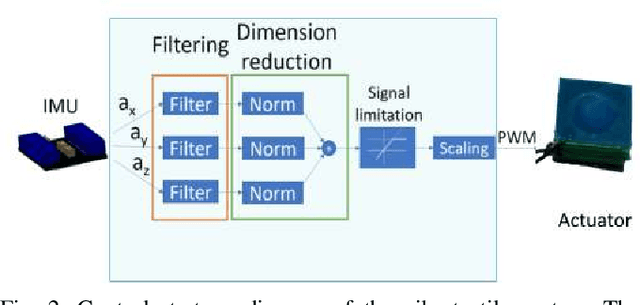

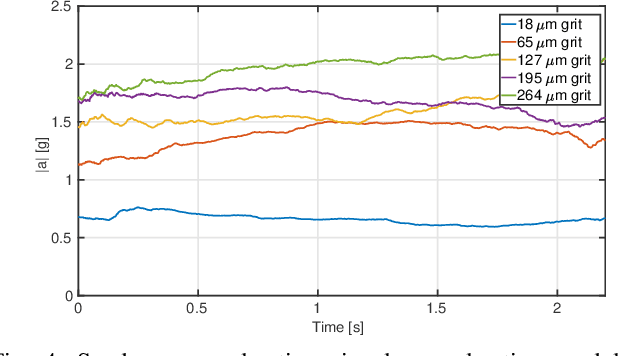
The use of vibrotactile feedback is of growing interest in the field of prosthetics, but few devices fully integrate this technology in the prosthesis to transmit high-frequency contact information (such as surface roughness and first contact) arising from the interaction of the prosthetic device with external items. This study describes a wearable vibrotactile system for high-frequency tactile information embedded in the prosthetic socket. The device consists of two compact planar vibrotactile actuators in direct contact with the user's skin to transmit tactile cues. These stimuli are directly related to the acceleration profiles recorded with two IMUS placed on the distal phalanx of a soft under-actuated robotic prosthesis (SoftHand Pro). We characterized the system from a psychophysical point of view with fifteen able-bodied participants by computing participants' Just Noticeable Difference (JND) related to the discrimination of vibrotactile cues delivered on the index finger, which are associated with the exploration of different sandpapers. Moreover, we performed a pilot experiment with one SoftHand Pro prosthesis user by designing a task, i.e. Active Texture Identification, to investigate if our feedback could enhance users' roughness discrimination. Results indicate that the device can effectively convey contact and texture cues, which users can readily detect and distinguish.