 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Characterization, and Validation of a Variable Stiffness Prosthetic Elbow
Dec 05, 2024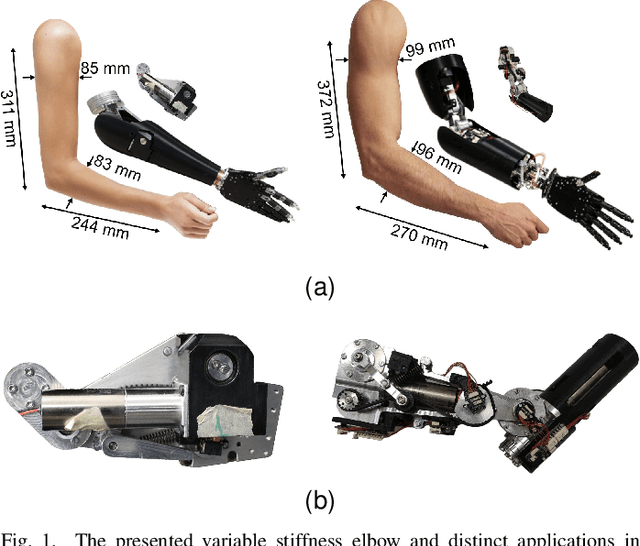
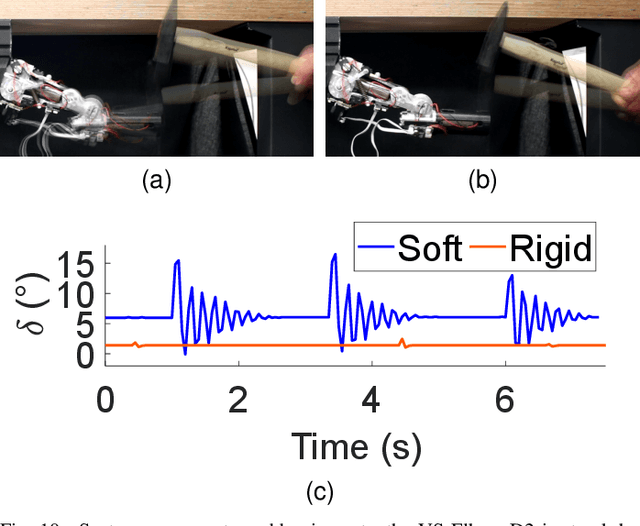
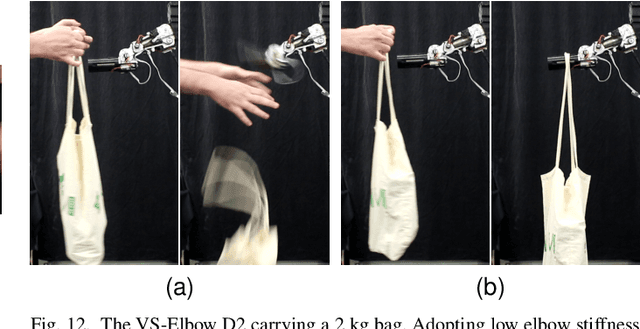
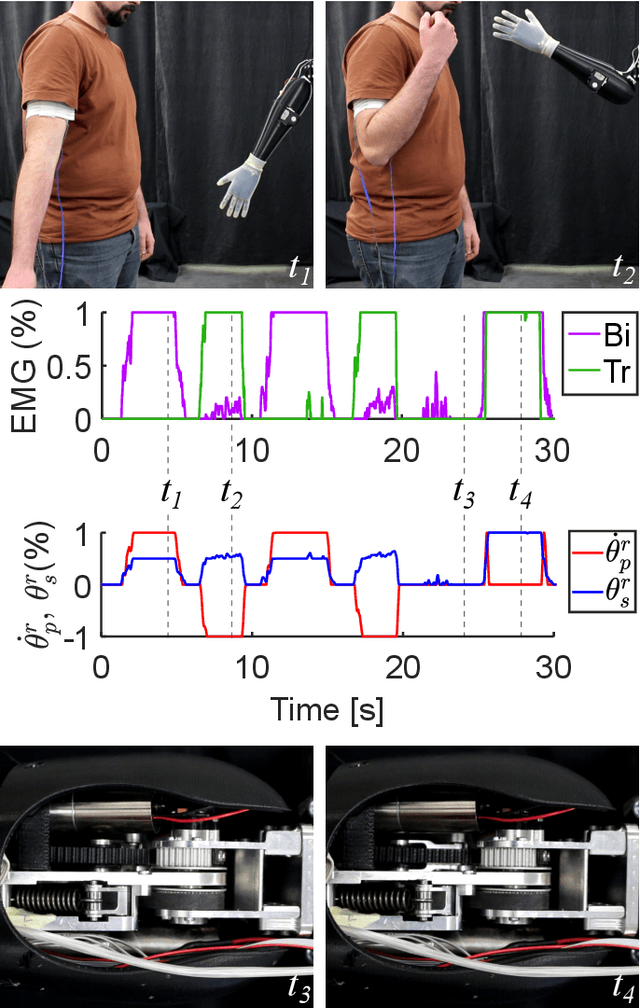
Intuitively, prostheses with user-controllable stiffness could mimic the intrinsic behavior of the human musculoskeletal system, promoting safe and natural interactions and task adaptability in real-world scenarios. However, prosthetic design often disregards compliance because of the additional complexity, weight, and needed control channels. This paper focuses on designing a Variable Stiffness Actuator (VSA) with weight, size, and performance compatible with prosthetic applications, addressing its implementation for the elbow joint. While a direct biomimetic approach suggests adopting an Agonist-Antagonist (AA) layout to replicate the biceps and triceps brachii with elastic actuation, this solution is not optimal to accommodate the varied morphologies of residual limbs. Instead, we employed the AA layout to craft an elbow prosthesis fully contained in the user's forearm, catering to individuals with distal transhumeral amputations. Additionally, we introduce a variant of this design where the two motors are split in the upper arm and forearm to distribute mass and volume more evenly along the bionic limb, enhancing comfort for patients with more proximal amputation levels. We characterize and validate our approach, demonstrating that both architectures meet the target requirements for an elbow prosthesis. The system attains the desired 120{\deg} range of motion, achieves the target stiffness range of [2, 60] Nm/rad, and can actively lift up to 3 kg. Our novel design reduces weight by up to 50% compared to existing VSAs for elbow prostheses while achieving performance comparable to the state of the art. Case studies suggest that passive and variable compliance could enable robust and safe interactions and task adaptability in the real world.
* This article has been accepted for publication in IEEE Transactions on Robotics. This is the author's version which has not been fully edited and content may change prior to final publication. Citation information: DOI 10.1109/TRO.2024.3492372
Modeling and Control of a novel Variable Stiffness three DoF Wrist
May 25, 2023This paper presents a novel design for a Variable Stiffness 3 DoF actuated wrist to improve task adaptability and safety during interactions with people and objects. The proposed design employs a hybrid serial-parallel configuration to achieve a 3 DoF wrist joint which can actively and continuously vary its overall stiffness thanks to the redundant elastic actuation system, using only four motors. Its stiffness control principle is similar to human muscular impedance regulation, with the shape of the stiffness ellipsoid mostly depending on posture, while the elastic cocontraction modulates its overall size. The employed mechanical configuration achieves a compact and lightweight device that, thanks to its anthropomorphous characteristics, could be suitable for prostheses and humanoid robots. After introducing the design concept of the device, this work provides methods to estimate the posture of the wrist by using joint angle measurements and to modulate its stiffness. Thereafter, this paper describes the first physical implementation of the presented design, detailing the mechanical prototype and electronic hardware, the control architecture, and the associated firmware. The reported experimental results show the potential of the proposed device while highlighting some limitations. To conclude, we show the motion and stiffness behavior of the device with some qualitative experiments.