 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWave Focusing in Metamaterials: Tactile Displays Beyond the Diffraction Limit
Jun 04, 2026We address the challenge of engineering distributed haptic displays capable of reproducing multiple localized, independently addressable vibrations -- representing virtual tactile pixels -- at arbitrary locations on a surface. Our technique is based on the focusing of mechanical waves in a flexural plate using a sparse set of actuators. At tactile frequencies, wave diffraction prevents the formation of localized virtual tactile pixels at spatial scales relevant for multi-digit touch interactions. We overcome this limitation by augmenting the plate with a lattice of mechanical resonators, forming a locally resonant metamaterial plate. Coupling between the plate's dynamic modes and those of the resonators alters the dispersion relation governing wave transmission, introducing a slow-wave branch that enables focusing beyond the diffraction limit imposed by the unmodified plate. We use numerical simulations to engineer the dispersion relation of the metamaterial system for high-resolution focusing at tactile frequencies. We then fabricate a metamaterial tactile display and experimentally demonstrate virtual pixels that are far more localized than those generated on an otherwise identical plate without resonators, resulting in a tenfold reduction in virtual-pixel area. In behavioral experiments, we show that this system can deliver perceptually localized single- and multi-point tactile feedback and moving tactile sources while maintaining independent control over temporal waveforms at multiple display locations. The methods reported here can enable high-resolution haptic displays for widespread applications using a small number of actuated degrees of freedom.
Thermopneumatic Pixels for Fast, Localized, Low-Voltage Touch Feedback
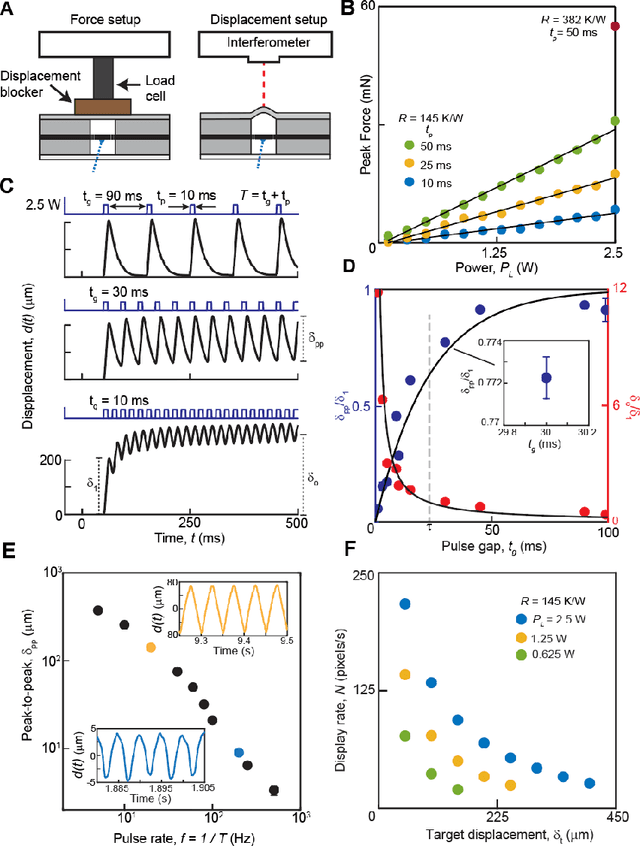
Mar 17, 2026We present thermopneumatic pixels (TPPs), which are tactile actuators designed for rapid fabrication and straightforward integration into compact wearable and surface-based haptic systems. Each TPP converts low-voltage ($\sim$10 V) electrical pulses into transient pressure increases within a sealed cavity, producing out-of-plane forces and displacements suitable for tactile stimulation. The architecture enables scalable fabrication and spatially distributed actuation while maintaining simple electrical interfacing. The TPPs are constructed from inexpensive, readily available materials using straightforward layer-based assembly, facilitating rapid prototyping and integration into interactive devices. Mechanical characterization demonstrates peak forces exceeding 1 N and millimeter displacements. We further present driving electronics for operating multiple TPP modules concurrently and report perceptual study results demonstrating the effectiveness of the resulting tactile feedback. Together, these results establish low-voltage thermopneumatic actuation as an accessible and high-performance approach for embedding tactile feedback into experimental and consumer-facing interfaces.
Haptic Light-Emitting Diodes: Miniature, Luminous Tactile Actuators
Jan 16, 2026We present Haptic Light-Emitting Diodes (HLEDs), luminous thermopneumatic actuators that directly convert pulsed light into mechanical forces and displacements. Each device packages a miniature surface-mount LED in a gas-filled cavity that contains a low-inertia graphite photoabsorber. The cavity is sealed by an elastic membrane, which functions as a working diaphragm. Brief optical pulses heat the photoabsorber, which heats the gas. The resulting rapid pressure increases generate forces and displacements at the working diaphragm. Millimeter-scale HLEDs produce forces exceeding 0.4 N and displacements of 1 mm at low voltages, with 5 to 100 ms response times, making them attractive as actuators providing tactile feedback in human-machine interfaces. Perceptual testing revealed that the strength of tactile feedback increased linearly with optical power. HLEDs devices are mechanically simple and efficient to fabricate. Unusually, these actuators are also light-emitting, as a fraction of optical energy is transmitted through the membrane. These opto-mechanical actuators have many potential applications in tactile displays, human interface engineering, wearable computing, and other areas.
Tactile Displays Driven by Projected Light
Oct 07, 2024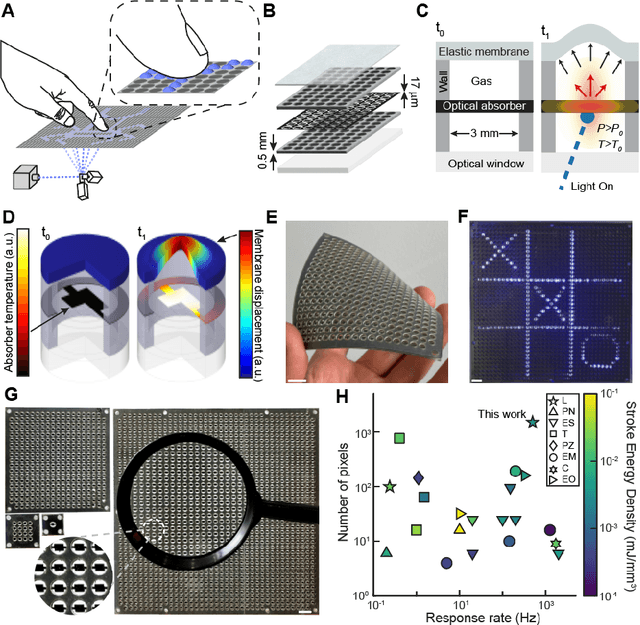
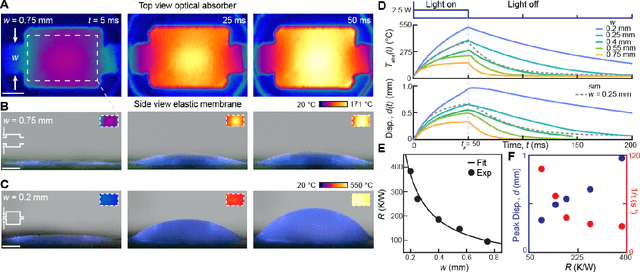
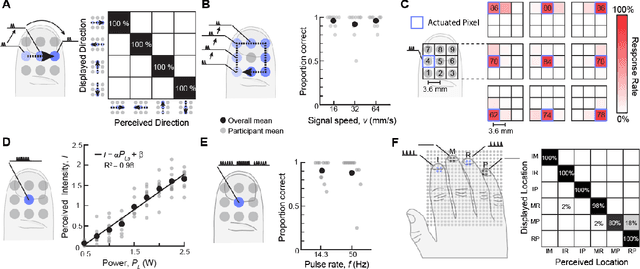
Tactile displays that lend tangible form to digital content could profoundly transform how we interact with computers, much like visual displays have driven successive revolutions in computing over the past 60 years. However, creating tactile displays with the actuation speeds, dynamic ranges, and resolutions that are required for perceptual fidelity has proved challenging. Here, we present a tactile display that directly converts projected light into visible tactile patterns using an energetically passive, photomechanical surface populated with arrays of millimeter-scale optotactile pixels. The pixels transduce incident light into mechanical displacements through rapid, light-stimulated thermal gas expansion, yielding displacements of up to 1 millimeter and response times of 2 to 100 milliseconds. Our use of projected light for power transmission and addressing enables these displays to be scaled in size and resolution at sustainable cost and complexity. We demonstrate devices with up to 1,511 independently addressable pixels. Perceptual studies confirm the capacity of the display to accurately reproduce tactile patterns in location, timing, frequency, and structure. This research establishes a foundation for practical, versatile high-resolution tactile displays driven by light.
Tactile Perception in Upper Limb Prostheses: Mechanical Characterization, Human Experiments, and Computational Findings
Feb 20, 2024



Our research investigates vibrotactile perception in four prosthetic hands with distinct kinematics and mechanical characteristics. We found that rigid and simple socket-based prosthetic devices can transmit tactile information and surprisingly enable users to identify the stimulated finger with high reliability. This ability decreases with more advanced prosthetic hands with additional articulations and softer mechanics. We conducted experiments to understand the underlying mechanisms. We assessed a prosthetic user's ability to discriminate finger contacts based on vibrations transmitted through the four prosthetic hands. We also performed numerical and mechanical vibration tests on the prostheses and used a machine learning classifier to identify the contacted finger. Our results show that simpler and rigid prosthetic hands facilitate contact discrimination (for instance, a user of a purely cosmetic hand can distinguish a contact on the index finger from other fingers with 83% accuracy), but all tested hands, including soft advanced ones, performed above chance level. Despite advanced hands reducing vibration transmission, a machine learning algorithm still exceeded human performance in discriminating finger contacts. These findings suggest the potential for enhancing vibrotactile feedback in advanced prosthetic hands and lay the groundwork for future integration of such feedback in prosthetic devices.
A peristaltic soft, wearable robot for compression and massage therapy
Jun 02, 2022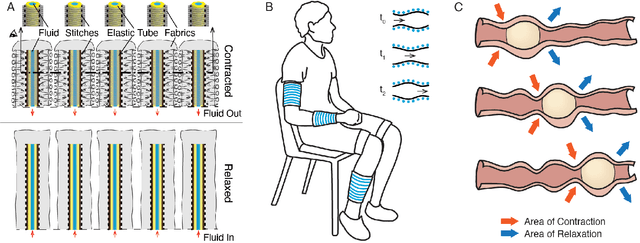
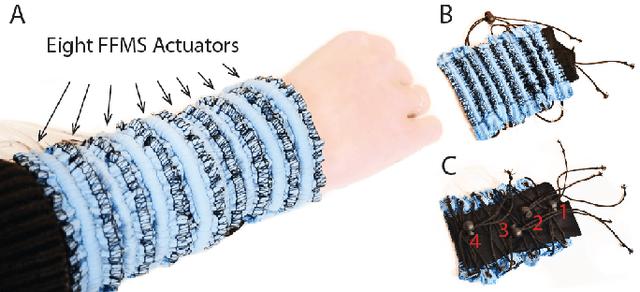
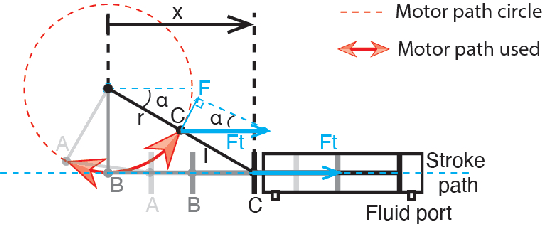
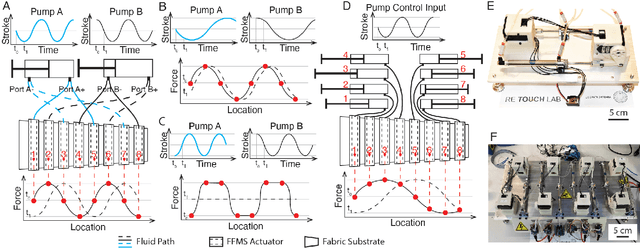
Soft robotics is attractive for wearable applications that require conformal interactions with the human body. Soft wearable robotic garments hold promise for supplying dynamic compression or massage therapies, such as are applied for disorders affecting lymphatic and blood circulation. In this paper, we present a wearable robot capable of supplying dynamic compression and massage therapy via peristaltic motion of finger-sized soft, fluidic actuators. We show that this peristaltic wearable robot can supply dynamic compression pressures exceeding 22 kPa at frequencies of 14 Hz or more, meeting requirements for compression and massage therapy. A large variety of software-programmable compression wave patterns can be generated by varying frequency, amplitude, phase delay, and duration parameters. We first demonstrate the utility of this peristaltic wearable robot for compression therapy, showing fluid transport in a laboratory model of the upper limb. We theoretically and empirically identify driving regimes that optimize fluid transport. We second demonstrate the utility of this garment for dynamic massage therapy. These findings show the potential of such a wearable robot for the treatment of several health disorders associated with lymphatic and blood circulation, such as lymphedema and blood clots.
A Multimodal, Enveloping Soft Gripper: Shape Conformation, Bioinspired Adhesion, and Expansion-Driven Suction
Dec 14, 2019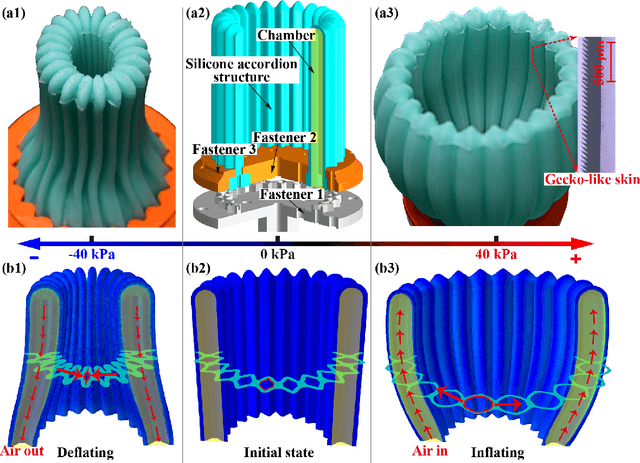
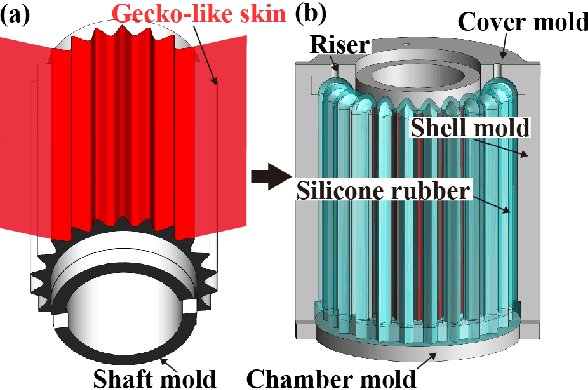
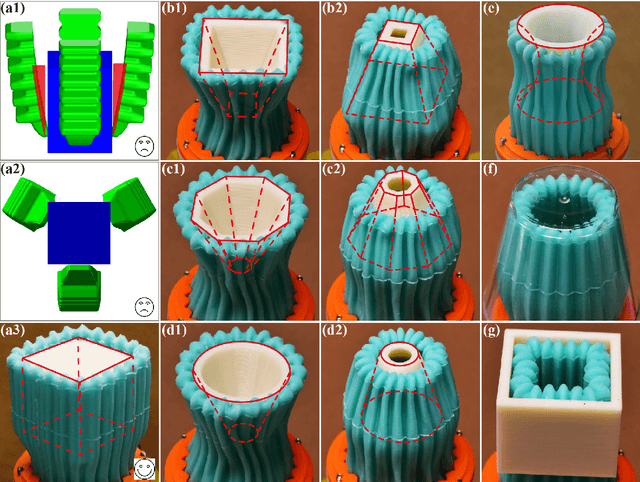
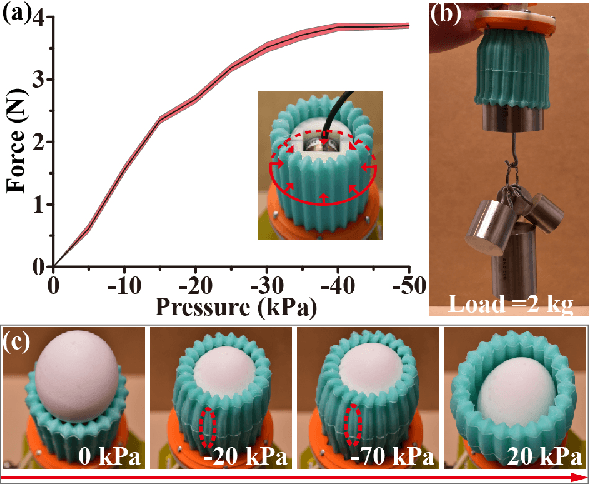
A key challenge in robotics is to create efficient methods for grasping objects with diverse shapes, sizes, poses, and properties. Grasping with hand-like end effectors often requires careful selection of hand orientation and finger placement. Here, we present a soft, fingerless gripper capable of efficiently generating multiple grasping modes. It is based on a soft, cylindrical accordion structure containing coupled, parallel fluidic channels. It is controlled via pressure supplied from a single fluidic port. Inflation opens the gripper orifice for enveloping an object, while deflation allows it to produce grasping forces. The interior is patterned with a gecko-like skin that increases friction, enabling the gripper to lift objects weighing up to 20 N. Our design ensures that fragile objects, such as eggs, can be safely handled, by virtue of a wall buckling mechanism. The gripper can integrate a lip that enables it to form a seal and, upon inflating, to generate suction for lifting objects with flat surfaces. The gripper may also be inflated to expand into an opening or orifice for grasping objects with handles or openings. We describe the design and fabrication of this device and present an analytical model of its behavior when operated from a single fluidic port. In experiments, we demonstrate its ability to grasp diverse objects, and show that its performance is well described by our model. Our findings show how a fingerless soft gripper can efficiently perform a variety of grasping operations. Such devices could improve the ability of robotic systems to meet applications in areas of great economic and societal importance.
A Wearable Tactile Sensor Array for Large Area Remote Vibration Sensing in the Hand
Aug 22, 2019
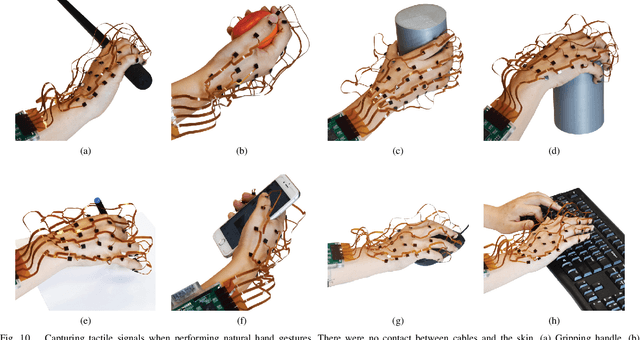
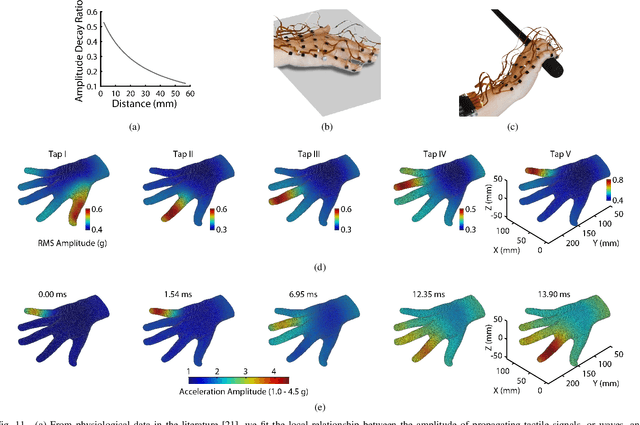
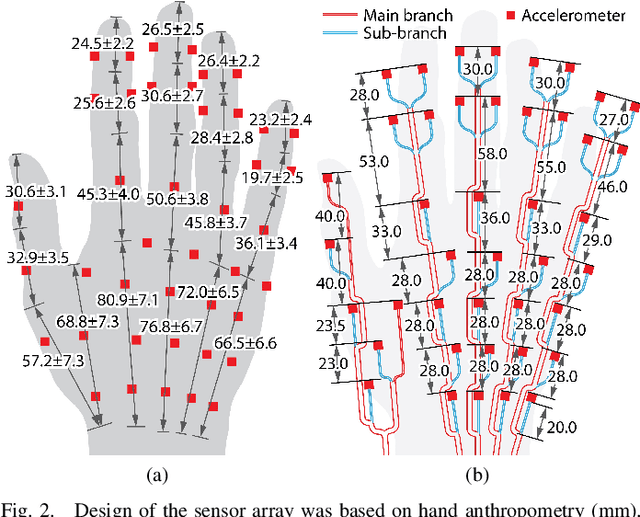
Tactile sensing is a essential for skilled manipulation and object perception, but existing devices are unable to capture mechanical signals in the full gamut of regimes that are important for human touch sensing, and are unable to emulate the sensing abilities of the human hand. Recent research reveals that human touch sensing relies on the transmission of mechanical waves throughout tissues of the hand. This provides the hand with remarkable abilities to remotely capture distributed vibration signatures of touch contact. Little engineering attention has been given to important sensory system. Here, we present a wearable device inspired by the anatomy and function of the hand and by human sensory abilities. The device is based on a 126 channel sensor array capable of capturing high resolution tactile signals during natural manual activities. It employs a network of miniature three-axis sensors mounted on a flexible circuit whose geometry and topology were designed match the anatomy of the hand, permitting data capture during natural interactions, while minimizing artifacts. Each sensor possesses a frequency bandwidth matching the human tactile frequency range. Data is acquired in real time via a custom FPGA and an I$^2$C network. We also present physiologically informed signal processing methods for reconstructing whole hand tactile signals using data from this system. We report experiments that demonstrate the ability of this system to accurately capture remotely produced whole hand tactile signals during manual interactions.
Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics
Mar 19, 2019
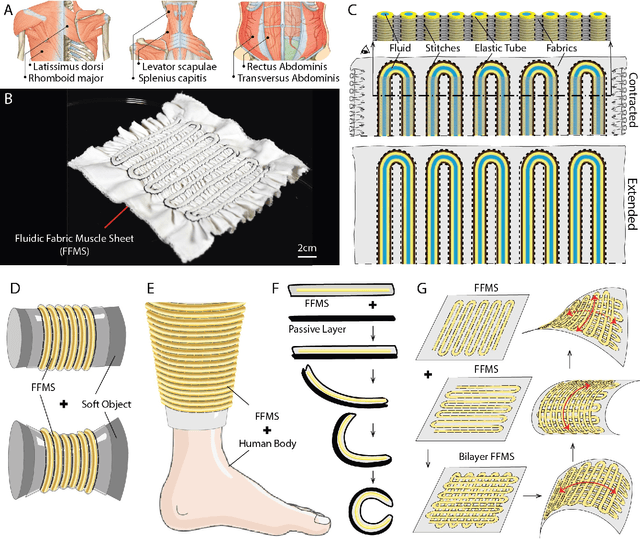

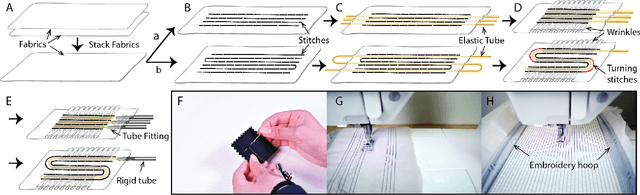
Conformable robotic systems are attractive for applications in which they can be used to actuate structures with large surface areas, to provide forces through wearable garments, or to realize autonomous robotic systems. We present a new family of soft actuators that we refer to as Fluidic Fabric Muscle Sheets (FFMS). They are composite fabric structures that integrate fluidic transmissions based on arrays of elastic tubes. These sheet-like actuators can strain, squeeze, bend, and conform to hard or soft objects of arbitrary shapes or sizes, including the human body. We show how to design and fabricate FFMS actuators via facile apparel engineering methods, including computerized sewing techniques. Together, these determine the distributions of stresses and strains that can be generated by the FFMS. We present a simple mathematical model that proves effective for predicting their performance. FFMS can operate at frequencies of 5 Hertz or more, achieve engineering strains exceeding 100%, and exert forces greater than 115 times their own weight. They can be safely used in intimate contact with the human body even when delivering stresses exceeding 10$^\text{6}$ Pascals. We demonstrate their versatility for actuating a variety of bodies or structures, and in configurations that perform multi-axis actuation, including bending and shape change. As we also show, FFMS can be used to exert forces on body tissues for wearable and biomedical applications. We demonstrate several potential use cases, including a miniature steerable robot, a glove for grasp assistance, garments for applying compression to the extremities, and devices for actuating small body regions or tissues via localized skin stretch.