 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Displays Driven by Projected Light
Oct 07, 2024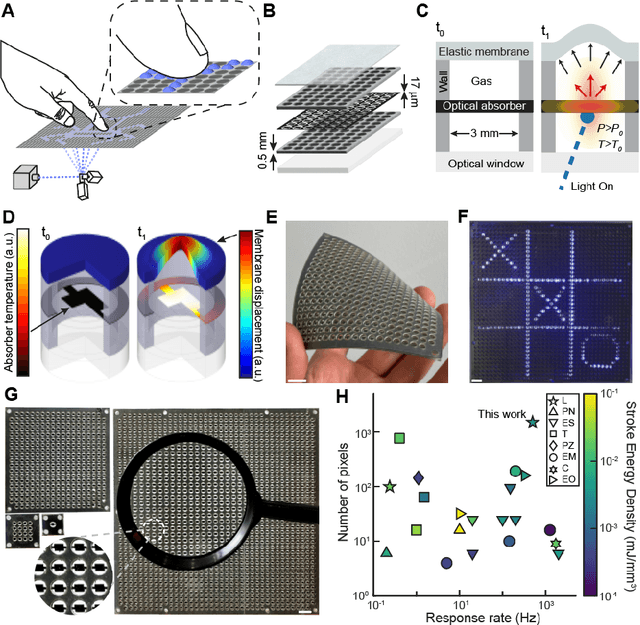
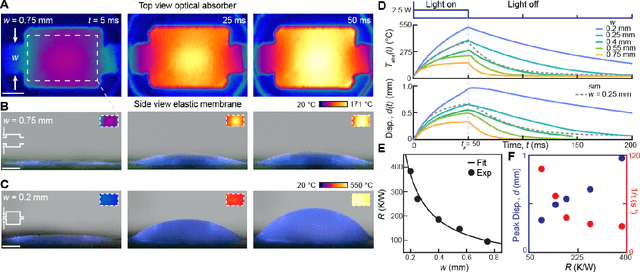
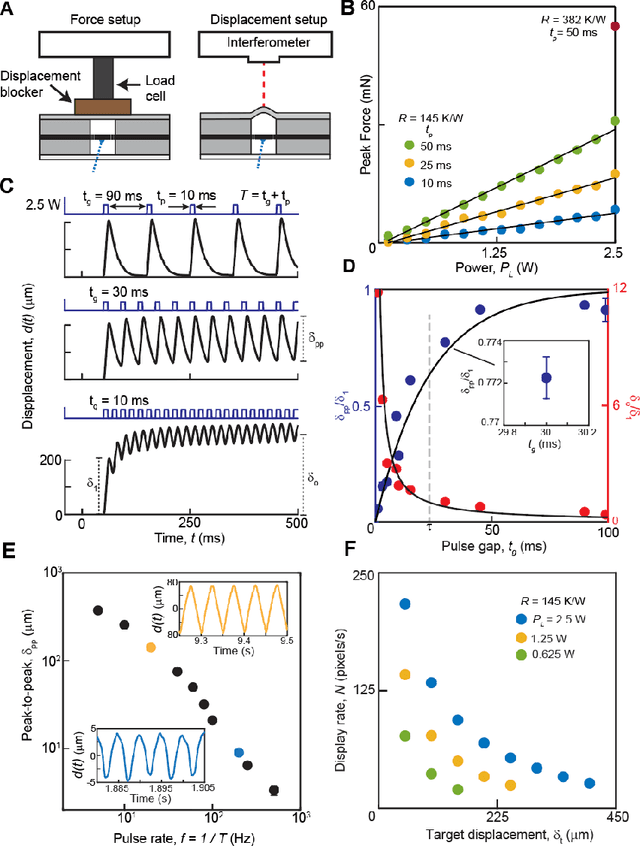
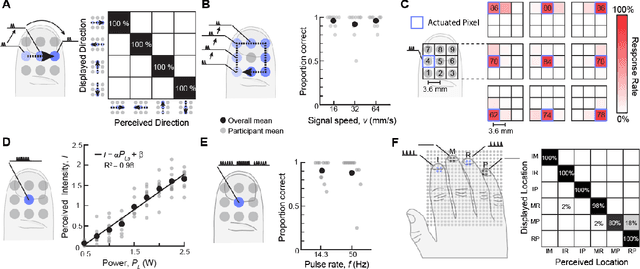
Tactile displays that lend tangible form to digital content could profoundly transform how we interact with computers, much like visual displays have driven successive revolutions in computing over the past 60 years. However, creating tactile displays with the actuation speeds, dynamic ranges, and resolutions that are required for perceptual fidelity has proved challenging. Here, we present a tactile display that directly converts projected light into visible tactile patterns using an energetically passive, photomechanical surface populated with arrays of millimeter-scale optotactile pixels. The pixels transduce incident light into mechanical displacements through rapid, light-stimulated thermal gas expansion, yielding displacements of up to 1 millimeter and response times of 2 to 100 milliseconds. Our use of projected light for power transmission and addressing enables these displays to be scaled in size and resolution at sustainable cost and complexity. We demonstrate devices with up to 1,511 independently addressable pixels. Perceptual studies confirm the capacity of the display to accurately reproduce tactile patterns in location, timing, frequency, and structure. This research establishes a foundation for practical, versatile high-resolution tactile displays driven by light.
A Multimodal, Enveloping Soft Gripper: Shape Conformation, Bioinspired Adhesion, and Expansion-Driven Suction
Dec 14, 2019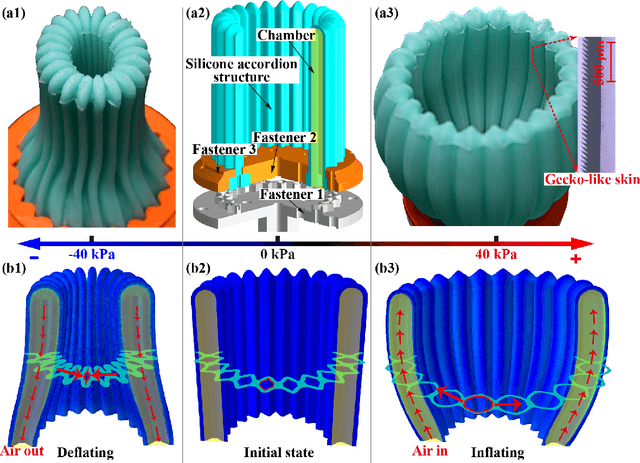
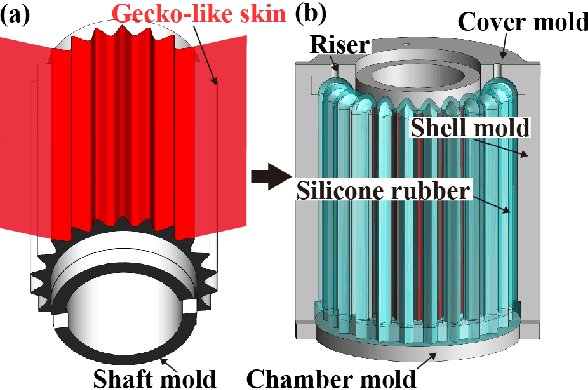
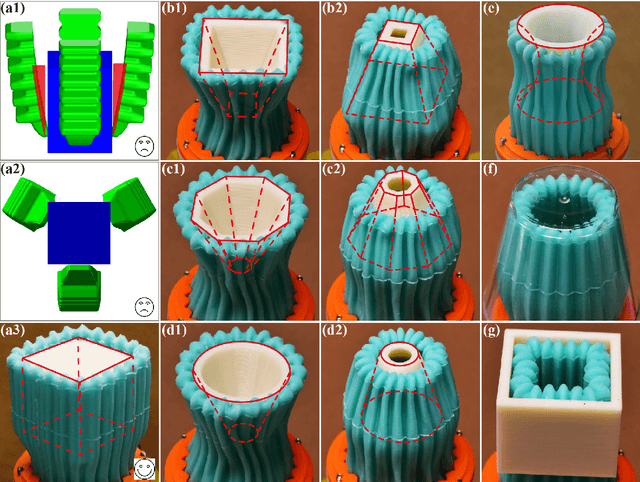
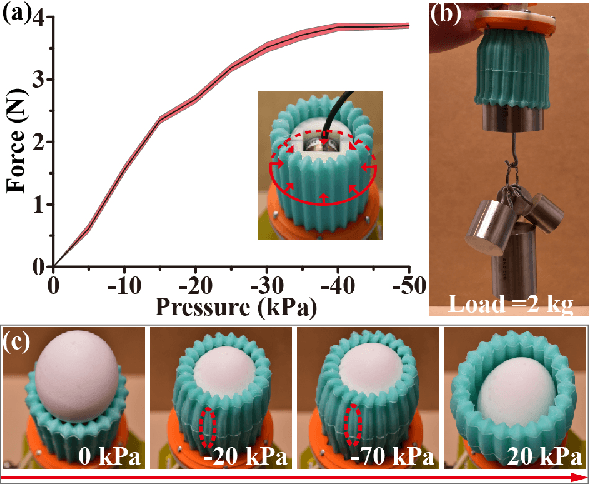
A key challenge in robotics is to create efficient methods for grasping objects with diverse shapes, sizes, poses, and properties. Grasping with hand-like end effectors often requires careful selection of hand orientation and finger placement. Here, we present a soft, fingerless gripper capable of efficiently generating multiple grasping modes. It is based on a soft, cylindrical accordion structure containing coupled, parallel fluidic channels. It is controlled via pressure supplied from a single fluidic port. Inflation opens the gripper orifice for enveloping an object, while deflation allows it to produce grasping forces. The interior is patterned with a gecko-like skin that increases friction, enabling the gripper to lift objects weighing up to 20 N. Our design ensures that fragile objects, such as eggs, can be safely handled, by virtue of a wall buckling mechanism. The gripper can integrate a lip that enables it to form a seal and, upon inflating, to generate suction for lifting objects with flat surfaces. The gripper may also be inflated to expand into an opening or orifice for grasping objects with handles or openings. We describe the design and fabrication of this device and present an analytical model of its behavior when operated from a single fluidic port. In experiments, we demonstrate its ability to grasp diverse objects, and show that its performance is well described by our model. Our findings show how a fingerless soft gripper can efficiently perform a variety of grasping operations. Such devices could improve the ability of robotic systems to meet applications in areas of great economic and societal importance.
Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics
Mar 19, 2019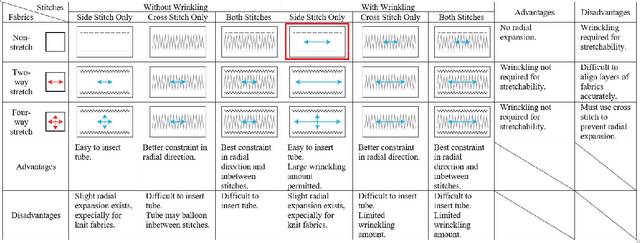
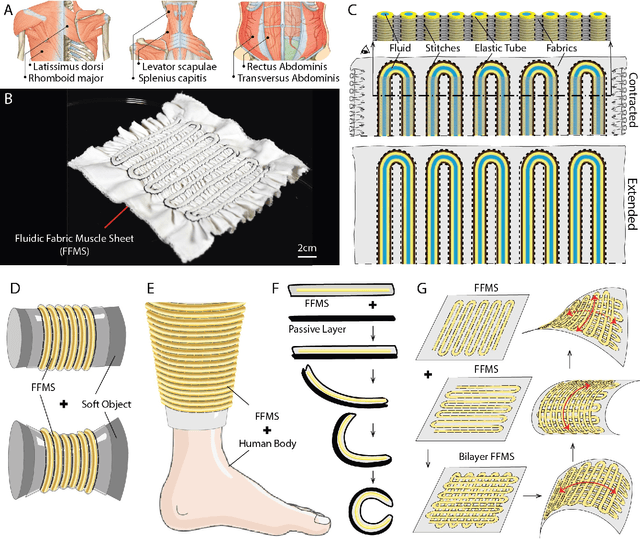

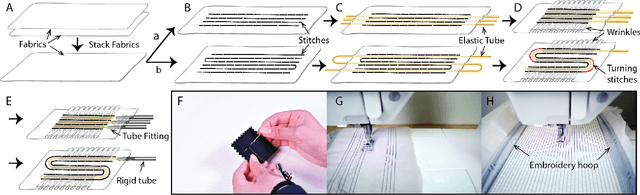
Conformable robotic systems are attractive for applications in which they can be used to actuate structures with large surface areas, to provide forces through wearable garments, or to realize autonomous robotic systems. We present a new family of soft actuators that we refer to as Fluidic Fabric Muscle Sheets (FFMS). They are composite fabric structures that integrate fluidic transmissions based on arrays of elastic tubes. These sheet-like actuators can strain, squeeze, bend, and conform to hard or soft objects of arbitrary shapes or sizes, including the human body. We show how to design and fabricate FFMS actuators via facile apparel engineering methods, including computerized sewing techniques. Together, these determine the distributions of stresses and strains that can be generated by the FFMS. We present a simple mathematical model that proves effective for predicting their performance. FFMS can operate at frequencies of 5 Hertz or more, achieve engineering strains exceeding 100%, and exert forces greater than 115 times their own weight. They can be safely used in intimate contact with the human body even when delivering stresses exceeding 10$^\text{6}$ Pascals. We demonstrate their versatility for actuating a variety of bodies or structures, and in configurations that perform multi-axis actuation, including bending and shape change. As we also show, FFMS can be used to exert forces on body tissues for wearable and biomedical applications. We demonstrate several potential use cases, including a miniature steerable robot, a glove for grasp assistance, garments for applying compression to the extremities, and devices for actuating small body regions or tissues via localized skin stretch.