 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal and Preference-based Optimization with Mixed Variables using Piecewise Affine Surrogates
Feb 09, 2023Optimization problems involving mixed variables, i.e., variables of numerical and categorical nature, can be challenging to solve, especially in the presence of complex constraints. Moreover, when the objective function is the result of a simulation or experiment, it may be expensive to evaluate. In this paper, we propose a novel surrogate-based global optimization algorithm, called PWAS, based on constructing a piecewise affine surrogate of the objective function over feasible samples. We introduce two types of exploration functions to efficiently search the feasible domain via mixed integer linear programming (MILP) solvers. We also provide a preference-based version of the algorithm, called PWASp, which can be used when only pairwise comparisons between samples can be acquired while the objective function remains unquantified. PWAS and PWASp are tested on mixed-variable benchmark problems with and without constraints. The results show that, within a small number of acquisitions, PWAS and PWASp can often achieve better or comparable results than other existing methods.
A peristaltic soft, wearable robot for compression and massage therapy
Jun 02, 2022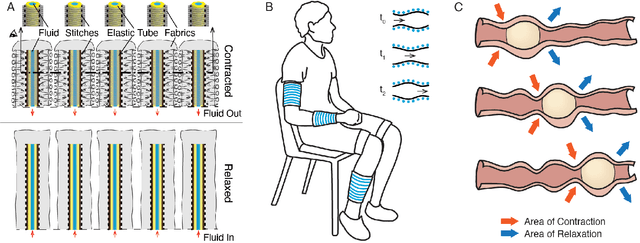
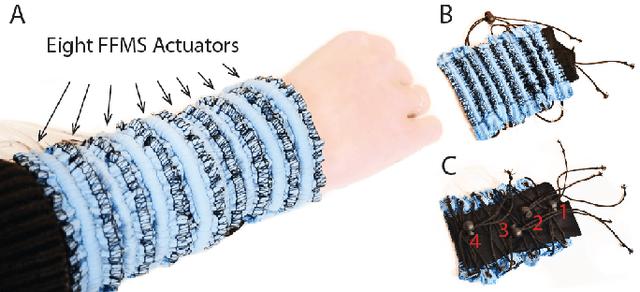
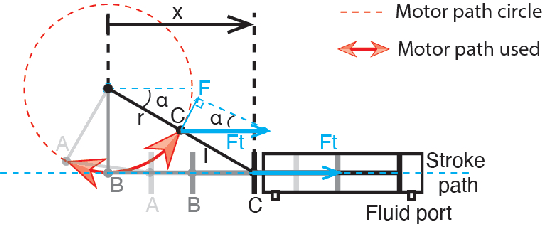
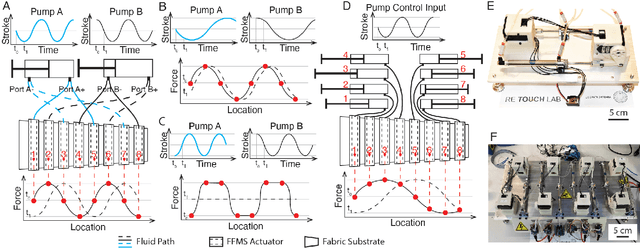
Soft robotics is attractive for wearable applications that require conformal interactions with the human body. Soft wearable robotic garments hold promise for supplying dynamic compression or massage therapies, such as are applied for disorders affecting lymphatic and blood circulation. In this paper, we present a wearable robot capable of supplying dynamic compression and massage therapy via peristaltic motion of finger-sized soft, fluidic actuators. We show that this peristaltic wearable robot can supply dynamic compression pressures exceeding 22 kPa at frequencies of 14 Hz or more, meeting requirements for compression and massage therapy. A large variety of software-programmable compression wave patterns can be generated by varying frequency, amplitude, phase delay, and duration parameters. We first demonstrate the utility of this peristaltic wearable robot for compression therapy, showing fluid transport in a laboratory model of the upper limb. We theoretically and empirically identify driving regimes that optimize fluid transport. We second demonstrate the utility of this garment for dynamic massage therapy. These findings show the potential of such a wearable robot for the treatment of several health disorders associated with lymphatic and blood circulation, such as lymphedema and blood clots.
A Multimodal, Enveloping Soft Gripper: Shape Conformation, Bioinspired Adhesion, and Expansion-Driven Suction
Dec 14, 2019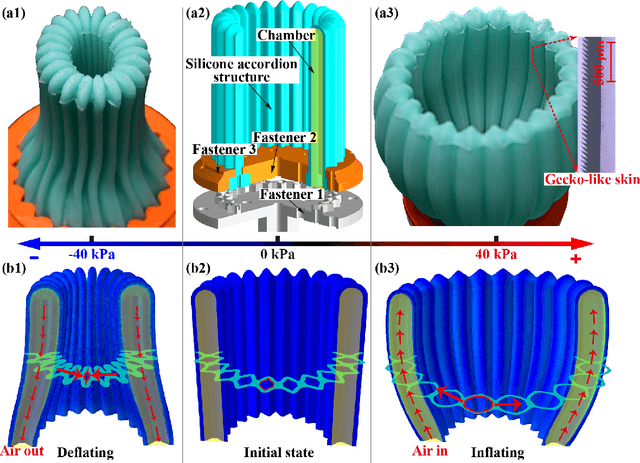
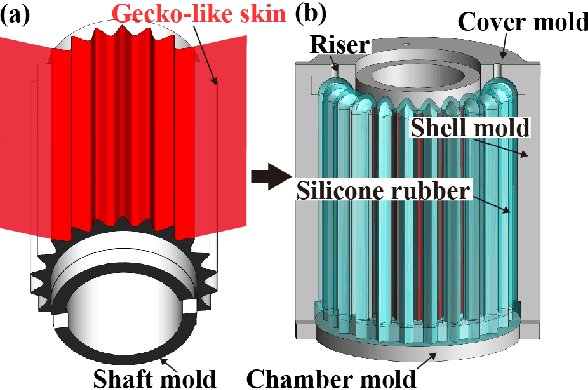
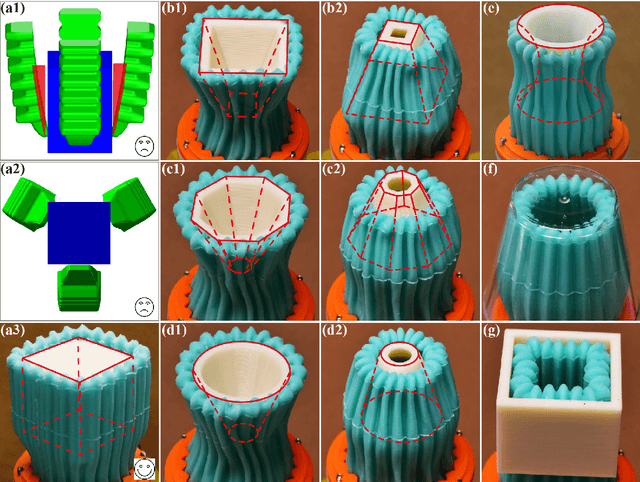
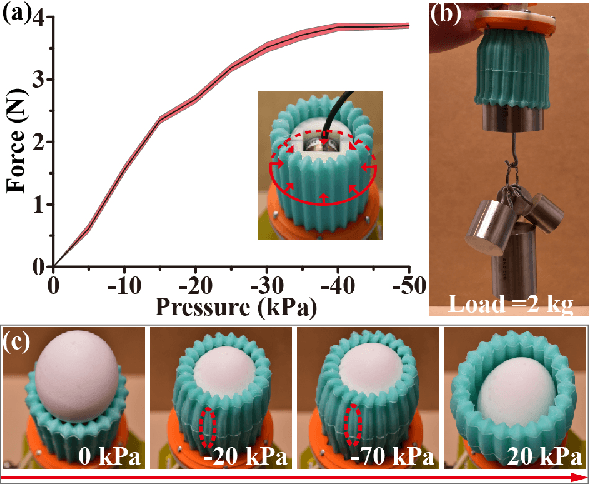
A key challenge in robotics is to create efficient methods for grasping objects with diverse shapes, sizes, poses, and properties. Grasping with hand-like end effectors often requires careful selection of hand orientation and finger placement. Here, we present a soft, fingerless gripper capable of efficiently generating multiple grasping modes. It is based on a soft, cylindrical accordion structure containing coupled, parallel fluidic channels. It is controlled via pressure supplied from a single fluidic port. Inflation opens the gripper orifice for enveloping an object, while deflation allows it to produce grasping forces. The interior is patterned with a gecko-like skin that increases friction, enabling the gripper to lift objects weighing up to 20 N. Our design ensures that fragile objects, such as eggs, can be safely handled, by virtue of a wall buckling mechanism. The gripper can integrate a lip that enables it to form a seal and, upon inflating, to generate suction for lifting objects with flat surfaces. The gripper may also be inflated to expand into an opening or orifice for grasping objects with handles or openings. We describe the design and fabrication of this device and present an analytical model of its behavior when operated from a single fluidic port. In experiments, we demonstrate its ability to grasp diverse objects, and show that its performance is well described by our model. Our findings show how a fingerless soft gripper can efficiently perform a variety of grasping operations. Such devices could improve the ability of robotic systems to meet applications in areas of great economic and societal importance.
Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics
Mar 19, 2019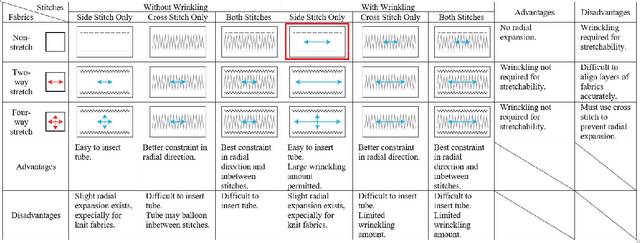
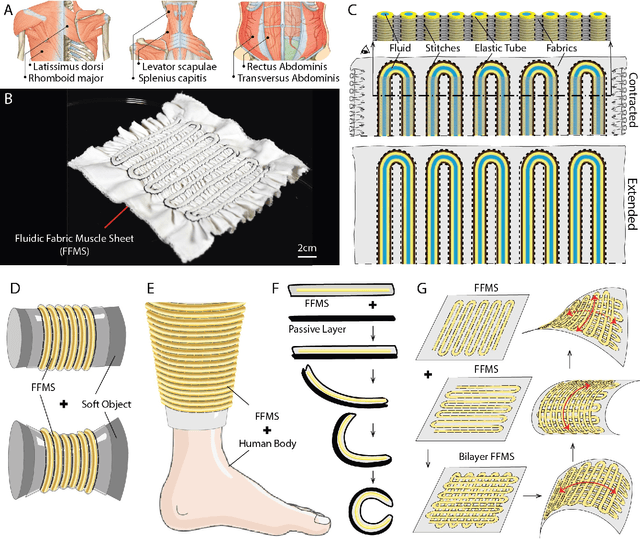

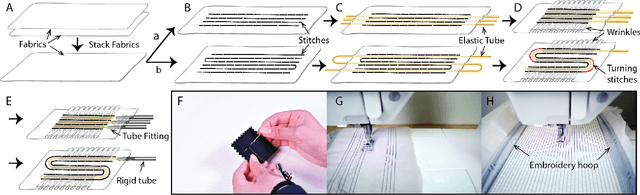
Conformable robotic systems are attractive for applications in which they can be used to actuate structures with large surface areas, to provide forces through wearable garments, or to realize autonomous robotic systems. We present a new family of soft actuators that we refer to as Fluidic Fabric Muscle Sheets (FFMS). They are composite fabric structures that integrate fluidic transmissions based on arrays of elastic tubes. These sheet-like actuators can strain, squeeze, bend, and conform to hard or soft objects of arbitrary shapes or sizes, including the human body. We show how to design and fabricate FFMS actuators via facile apparel engineering methods, including computerized sewing techniques. Together, these determine the distributions of stresses and strains that can be generated by the FFMS. We present a simple mathematical model that proves effective for predicting their performance. FFMS can operate at frequencies of 5 Hertz or more, achieve engineering strains exceeding 100%, and exert forces greater than 115 times their own weight. They can be safely used in intimate contact with the human body even when delivering stresses exceeding 10$^\text{6}$ Pascals. We demonstrate their versatility for actuating a variety of bodies or structures, and in configurations that perform multi-axis actuation, including bending and shape change. As we also show, FFMS can be used to exert forces on body tissues for wearable and biomedical applications. We demonstrate several potential use cases, including a miniature steerable robot, a glove for grasp assistance, garments for applying compression to the extremities, and devices for actuating small body regions or tissues via localized skin stretch.