 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Light-Emitting Diodes: Miniature, Luminous Tactile Actuators
Jan 16, 2026We present Haptic Light-Emitting Diodes (HLEDs), luminous thermopneumatic actuators that directly convert pulsed light into mechanical forces and displacements. Each device packages a miniature surface-mount LED in a gas-filled cavity that contains a low-inertia graphite photoabsorber. The cavity is sealed by an elastic membrane, which functions as a working diaphragm. Brief optical pulses heat the photoabsorber, which heats the gas. The resulting rapid pressure increases generate forces and displacements at the working diaphragm. Millimeter-scale HLEDs produce forces exceeding 0.4 N and displacements of 1 mm at low voltages, with 5 to 100 ms response times, making them attractive as actuators providing tactile feedback in human-machine interfaces. Perceptual testing revealed that the strength of tactile feedback increased linearly with optical power. HLEDs devices are mechanically simple and efficient to fabricate. Unusually, these actuators are also light-emitting, as a fraction of optical energy is transmitted through the membrane. These opto-mechanical actuators have many potential applications in tactile displays, human interface engineering, wearable computing, and other areas.
A peristaltic soft, wearable robot for compression and massage therapy
Jun 02, 2022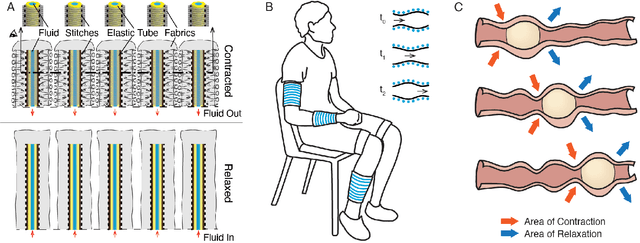
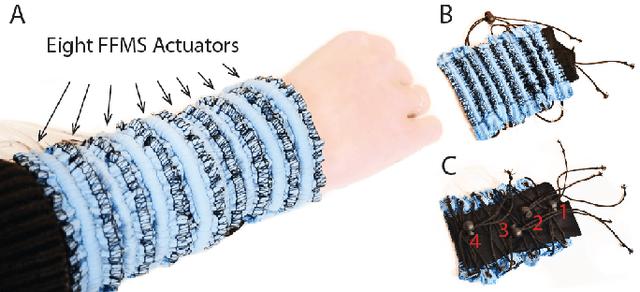
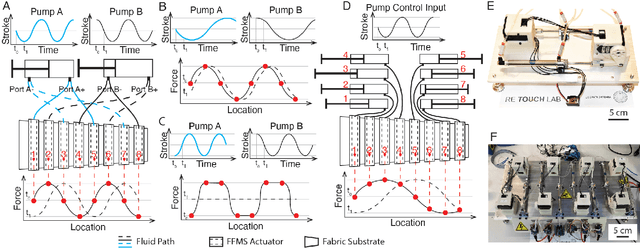
Soft robotics is attractive for wearable applications that require conformal interactions with the human body. Soft wearable robotic garments hold promise for supplying dynamic compression or massage therapies, such as are applied for disorders affecting lymphatic and blood circulation. In this paper, we present a wearable robot capable of supplying dynamic compression and massage therapy via peristaltic motion of finger-sized soft, fluidic actuators. We show that this peristaltic wearable robot can supply dynamic compression pressures exceeding 22 kPa at frequencies of 14 Hz or more, meeting requirements for compression and massage therapy. A large variety of software-programmable compression wave patterns can be generated by varying frequency, amplitude, phase delay, and duration parameters. We first demonstrate the utility of this peristaltic wearable robot for compression therapy, showing fluid transport in a laboratory model of the upper limb. We theoretically and empirically identify driving regimes that optimize fluid transport. We second demonstrate the utility of this garment for dynamic massage therapy. These findings show the potential of such a wearable robot for the treatment of several health disorders associated with lymphatic and blood circulation, such as lymphedema and blood clots.