 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Multi-Object Grasping
Mar 25, 2025In this work, we describe a multi-object grasping benchmark to evaluate the grasping and manipulation capabilities of robotic systems in both pile and surface scenarios. The benchmark introduces three robot multi-object grasping benchmarking protocols designed to challenge different aspects of robotic manipulation. These protocols are: 1) the Only-Pick-Once protocol, which assesses the robot's ability to efficiently pick multiple objects in a single attempt; 2) the Accurate pick-trnsferring protocol, which evaluates the robot's capacity to selectively grasp and transport a specific number of objects from a cluttered environment; and 3) the Pick-transferring-all protocol, which challenges the robot to clear an entire scene by sequentially grasping and transferring all available objects. These protocols are intended to be adopted by the broader robotics research community, providing a standardized method to assess and compare robotic systems' performance in multi-object grasping tasks. We establish baselines for these protocols using standard planning and perception algorithms on a Barrett hand, Robotiq parallel jar gripper, and the Pisa/IIT Softhand-2, which is a soft underactuated robotic hand. We discuss the results in relation to human performance in similar tasks we well.
Visual-TCAV: Concept-based Attribution and Saliency Maps for Post-hoc Explainability in Image Classification
Nov 08, 2024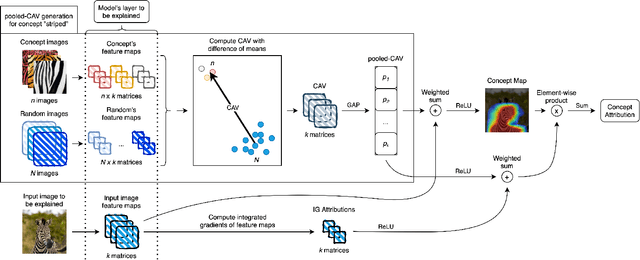
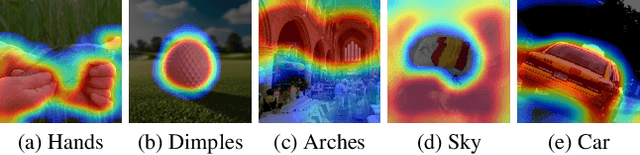
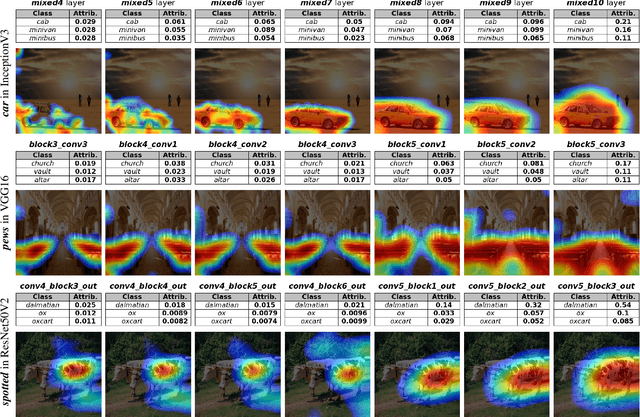
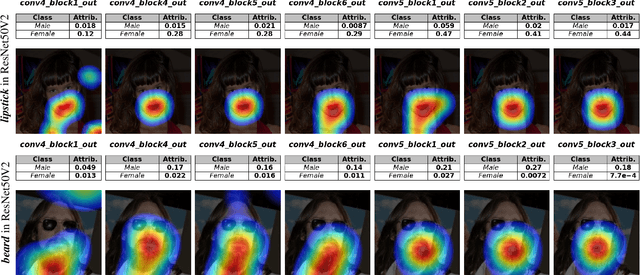
Convolutional Neural Networks (CNNs) have seen significant performance improvements in recent years. However, due to their size and complexity, they function as black-boxes, leading to transparency concerns. State-of-the-art saliency methods generate local explanations that highlight the area in the input image where a class is identified but cannot explain how a concept of interest contributes to the prediction, which is essential for bias mitigation. On the other hand, concept-based methods, such as TCAV (Testing with Concept Activation Vectors), provide insights into how sensitive is the network to a concept, but cannot compute its attribution in a specific prediction nor show its location within the input image. This paper introduces a novel post-hoc explainability framework, Visual-TCAV, which aims to bridge the gap between these methods by providing both local and global explanations for CNN-based image classification. Visual-TCAV uses Concept Activation Vectors (CAVs) to generate saliency maps that show where concepts are recognized by the network. Moreover, it can estimate the attribution of these concepts to the output of any class using a generalization of Integrated Gradients. This framework is evaluated on popular CNN architectures, with its validity further confirmed via experiments where ground truth for explanations is known, and a comparison with TCAV. Our code will be made available soon.
Characterization, Experimental Validation and Pilot User Study of the Vibro-Inertial Bionic Enhancement System (VIBES)
Aug 22, 2024



This study presents the characterization and validation of the VIBES, a wearable vibrotactile device that provides high-frequency tactile information embedded in a prosthetic socket. A psychophysical characterization involving ten able-bodied participants is performed to compute the Just Noticeable Difference (JND) related to the discrimination of vibrotactile cues delivered on the skin in two forearm positions, with the goal of optimising vibrotactile actuator position to maximise perceptual response. Furthermore, system performance is validated and tested both with ten able-bodied participants and one prosthesis user considering three tasks. More specifically, in the Active Texture Identification, Slippage and Fragile Object Experiments, we investigate if the VIBES could enhance users' roughness discrimination and manual usability and dexterity. Finally, we test the effect of the vibrotactile system on prosthetic embodiment in a Rubber Hand Illusion (RHI) task. Results show the system's effectiveness in conveying contact and texture cues, making it a potential tool to restore sensory feedback and enhance the embodiment in prosthetic users.
Tactile SoftHand-A: 3D-Printed, Tactile, Highly-underactuated, Anthropomorphic Robot Hand with an Antagonistic Tendon Mechanism
Jun 18, 2024



For tendon-driven multi-fingered robotic hands, ensuring grasp adaptability while minimizing the number of actuators needed to provide human-like functionality is a challenging problem. Inspired by the Pisa/IIT SoftHand, this paper introduces a 3D-printed, highly-underactuated, five-finger robotic hand named the Tactile SoftHand-A, which features only two actuators. The dual-tendon design allows for the active control of specific (distal or proximal interphalangeal) joints to adjust the hand's grasp gesture. We have also developed a new design of fully 3D-printed tactile sensor that requires no hand assembly and is printed directly as part of the robotic finger. This sensor is integrated into the fingertips and combined with the antagonistic tendon mechanism to develop a human-hand-guided tactile feedback grasping system. The system can actively mirror human hand gestures, adaptively stabilize grasp gestures upon contact, and adjust grasp gestures to prevent object movement after detecting slippage. Finally, we designed four different experiments to evaluate the novel fingers coupled with the antagonistic mechanism for controlling the robotic hand's gestures, adaptive grasping ability, and human-hand-guided tactile feedback grasping capability. The experimental results demonstrate that the Tactile SoftHand-A can adaptively grasp objects of a wide range of shapes and automatically adjust its gripping gestures upon detecting contact and slippage. Overall, this study points the way towards a class of low-cost, accessible, 3D-printable, underactuated human-like robotic hands, and we openly release the designs to facilitate others to build upon this work. This work is Open-sourced at github.com/SoutheastWind/Tactile_SoftHand_A
Interpretable Network Visualizations: A Human-in-the-Loop Approach for Post-hoc Explainability of CNN-based Image Classification
May 06, 2024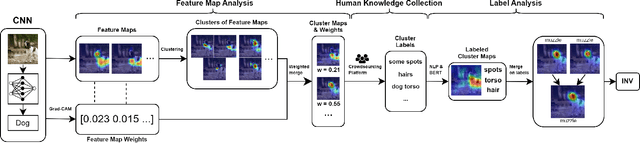
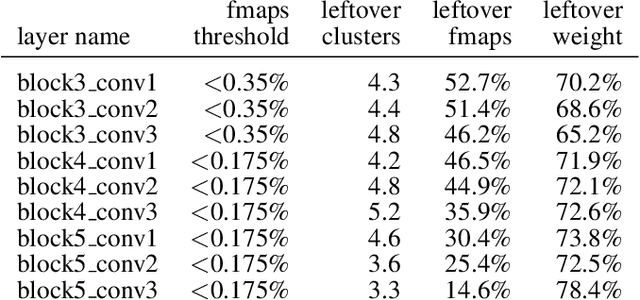
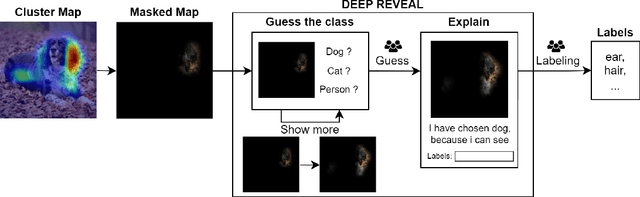

Transparency and explainability in image classification are essential for establishing trust in machine learning models and detecting biases and errors. State-of-the-art explainability methods generate saliency maps to show where a specific class is identified, without providing a detailed explanation of the model's decision process. Striving to address such a need, we introduce a post-hoc method that explains the entire feature extraction process of a Convolutional Neural Network. These explanations include a layer-wise representation of the features the model extracts from the input. Such features are represented as saliency maps generated by clustering and merging similar feature maps, to which we associate a weight derived by generalizing Grad-CAM for the proposed methodology. To further enhance these explanations, we include a set of textual labels collected through a gamified crowdsourcing activity and processed using NLP techniques and Sentence-BERT. Finally, we show an approach to generate global explanations by aggregating labels across multiple images.
Tactile Perception in Upper Limb Prostheses: Mechanical Characterization, Human Experiments, and Computational Findings
Feb 20, 2024



Our research investigates vibrotactile perception in four prosthetic hands with distinct kinematics and mechanical characteristics. We found that rigid and simple socket-based prosthetic devices can transmit tactile information and surprisingly enable users to identify the stimulated finger with high reliability. This ability decreases with more advanced prosthetic hands with additional articulations and softer mechanics. We conducted experiments to understand the underlying mechanisms. We assessed a prosthetic user's ability to discriminate finger contacts based on vibrations transmitted through the four prosthetic hands. We also performed numerical and mechanical vibration tests on the prostheses and used a machine learning classifier to identify the contacted finger. Our results show that simpler and rigid prosthetic hands facilitate contact discrimination (for instance, a user of a purely cosmetic hand can distinguish a contact on the index finger from other fingers with 83% accuracy), but all tested hands, including soft advanced ones, performed above chance level. Despite advanced hands reducing vibration transmission, a machine learning algorithm still exceeded human performance in discriminating finger contacts. These findings suggest the potential for enhancing vibrotactile feedback in advanced prosthetic hands and lay the groundwork for future integration of such feedback in prosthetic devices.
VIBES: Vibro-Inertial Bionic Enhancement System in a Prosthetic Socket
Dec 20, 2023
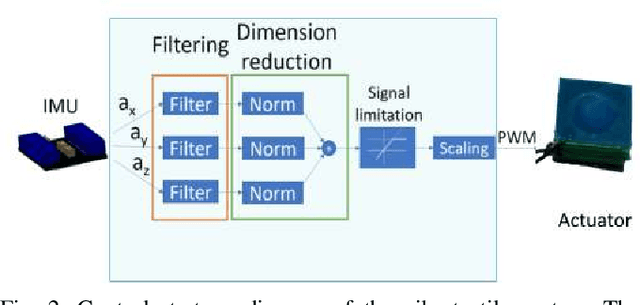

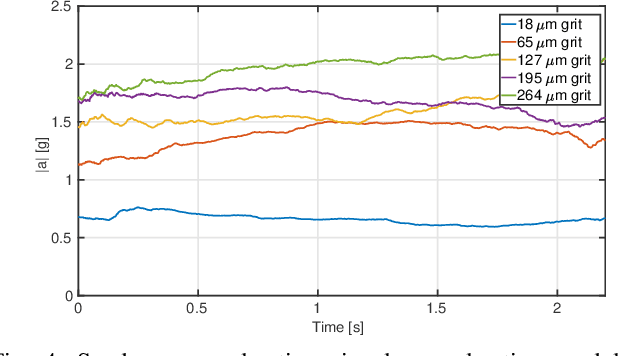
The use of vibrotactile feedback is of growing interest in the field of prosthetics, but few devices fully integrate this technology in the prosthesis to transmit high-frequency contact information (such as surface roughness and first contact) arising from the interaction of the prosthetic device with external items. This study describes a wearable vibrotactile system for high-frequency tactile information embedded in the prosthetic socket. The device consists of two compact planar vibrotactile actuators in direct contact with the user's skin to transmit tactile cues. These stimuli are directly related to the acceleration profiles recorded with two IMUS placed on the distal phalanx of a soft under-actuated robotic prosthesis (SoftHand Pro). We characterized the system from a psychophysical point of view with fifteen able-bodied participants by computing participants' Just Noticeable Difference (JND) related to the discrimination of vibrotactile cues delivered on the index finger, which are associated with the exploration of different sandpapers. Moreover, we performed a pilot experiment with one SoftHand Pro prosthesis user by designing a task, i.e. Active Texture Identification, to investigate if our feedback could enhance users' roughness discrimination. Results indicate that the device can effectively convey contact and texture cues, which users can readily detect and distinguish.
Tactile-Driven Gentle Grasping for Human-Robot Collaborative Tasks
Mar 16, 2023



This paper presents a control scheme for force sensitive, gentle grasping with a Pisa/IIT anthropomorphic SoftHand equipped with a miniaturised version of the TacTip optical tactile sensor on all five fingertips. The tactile sensors provide high-resolution information about a grasp and how the fingers interact with held objects. We first describe a series of hardware developments for performing asynchronous sensor data acquisition and processing, resulting in a fast control loop sufficient for real-time grasp control. We then develop a novel grasp controller that uses tactile feedback from all five fingertip sensors simultaneously to gently and stably grasp 43 objects of varying geometry and stiffness, which is then applied to a human-to-robot handover task. These developments open the door to more advanced manipulation with underactuated hands via fast reflexive control using high-resolution tactile sensing.
Performance Analysis of Vibrotactile and Slide-and-Squeeze Haptic Feedback Devices for Limbs Postural Adjustment
Jul 08, 2022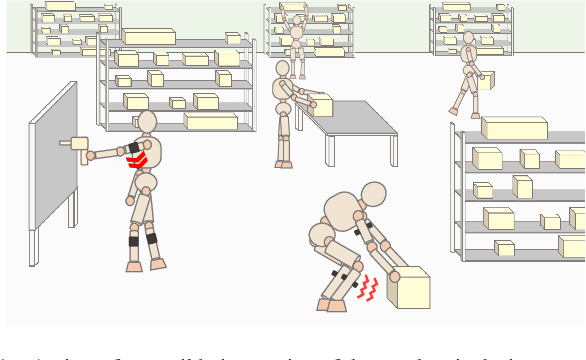

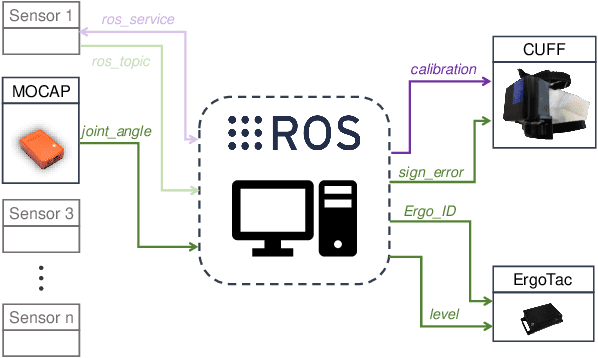
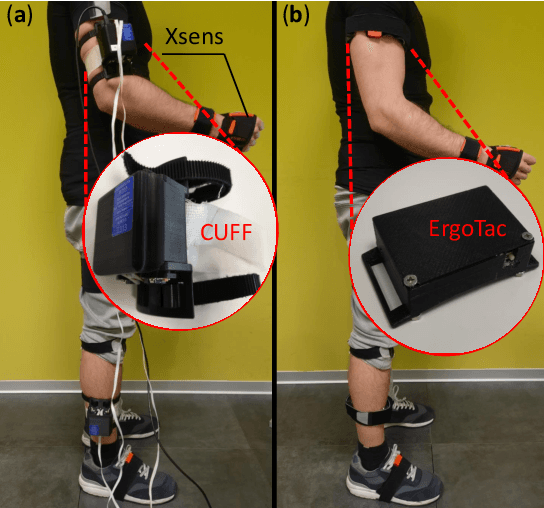
Recurrent or sustained awkward body postures are among the most frequently cited risk factors to the development of work-related musculoskeletal disorders (MSDs). To prevent workers from adopting harmful configurations but also to guide them toward more ergonomic ones, wearable haptic devices may be the ideal solution. In this paper, a vibrotactile unit, called ErgoTac, and a slide-and-squeeze unit, called CUFF, were evaluated in a limbs postural correction setting. Their capability of providing single-joint (shoulder or knee) and multi-joint (shoulder and knee at once) guidance was compared in twelve healthy subjects, using quantitative task-related metrics and subjective quantitative evaluation. An integrated environment was also built to ease communication and data sharing between the involved sensor and feedback systems. Results show good acceptability and intuitiveness for both devices. ErgoTac appeared as the suitable feedback device for the shoulder, while the CUFF may be the effective solution for the knee. This comparative study, although preliminary, was propaedeutic to the potential integration of the two devices for effective whole-body postural corrections, with the aim to develop a feedback and assistive apparatus to increase workers' awareness about risky working conditions and therefore to prevent MSDs.
BRL/Pisa/IIT SoftHand: A Low-cost, 3D-Printed, Underactuated, Tendon-Driven Hand with Soft and Adaptive Synergies
Jun 25, 2022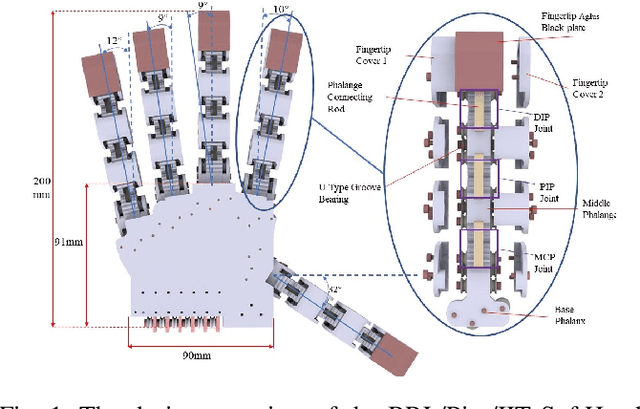
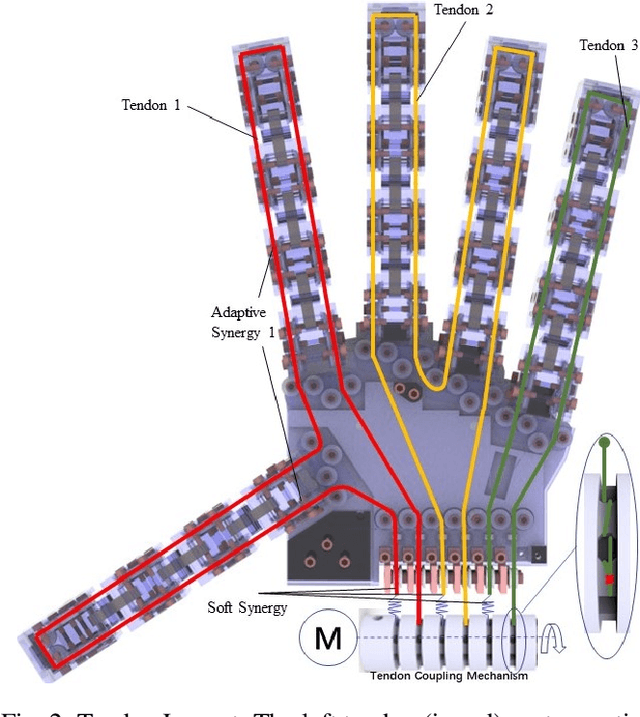
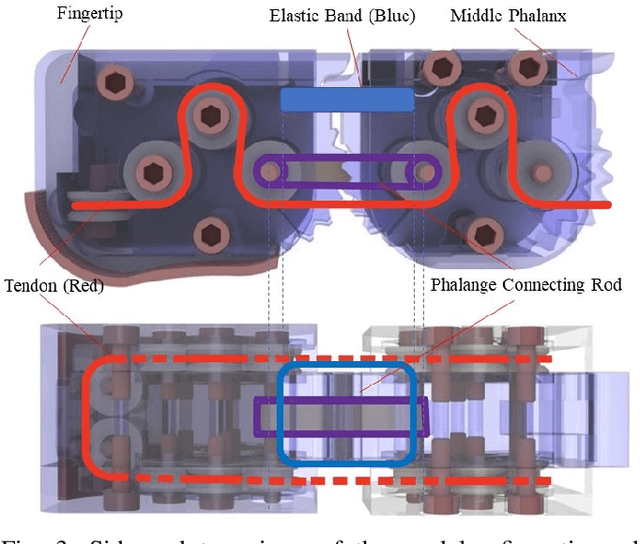
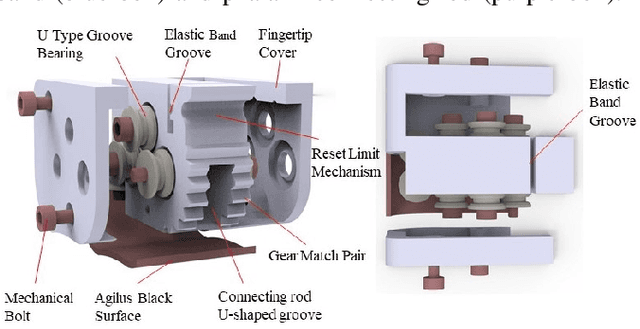
This paper introduces the BRL/Pisa/IIT (BPI) SoftHand: a single actuator-driven, low-cost, 3D-printed, tendon-driven, underactuated robot hand that can be used to perform a range of grasping tasks. Based on the adaptive synergies of the Pisa/IIT SoftHand, we design a new joint system and tendon routing to facilitate the inclusion of both soft and adaptive synergies, which helps us balance durability, affordability and grasping performance of the hand. The focus of this work is on the design, simulation, synergies and grasping tests of this SoftHand. The novel phalanges are designed and printed based on linkages, gear pairs and geometric restraint mechanisms, and can be applied to most tendon-driven robotic hands. We show that the robot hand can successfully grasp and lift various target objects and adapt to hold complex geometric shapes, reflecting the successful adoption of the soft and adaptive synergies. We intend to open-source the design of the hand so that it can be built cheaply on a home 3D-printer. For more detail: https://sites.google.com/view/bpi-softhandtactile-group-bri/brlpisaiit-softhand-design