 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIBES: Vibro-Inertial Bionic Enhancement System in a Prosthetic Socket
Paper and Code
Dec 20, 2023
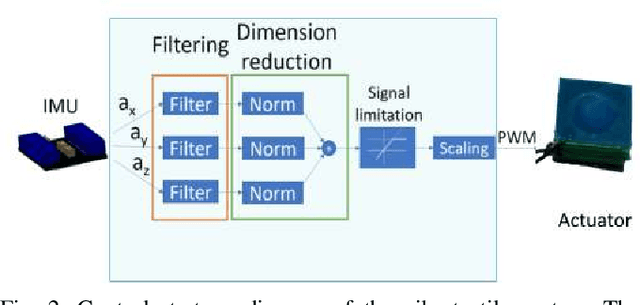

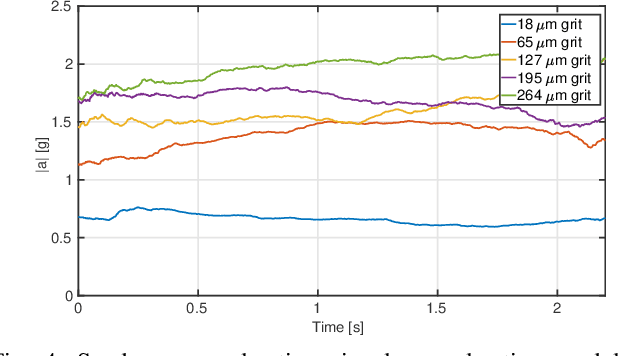
The use of vibrotactile feedback is of growing interest in the field of prosthetics, but few devices fully integrate this technology in the prosthesis to transmit high-frequency contact information (such as surface roughness and first contact) arising from the interaction of the prosthetic device with external items. This study describes a wearable vibrotactile system for high-frequency tactile information embedded in the prosthetic socket. The device consists of two compact planar vibrotactile actuators in direct contact with the user's skin to transmit tactile cues. These stimuli are directly related to the acceleration profiles recorded with two IMUS placed on the distal phalanx of a soft under-actuated robotic prosthesis (SoftHand Pro). We characterized the system from a psychophysical point of view with fifteen able-bodied participants by computing participants' Just Noticeable Difference (JND) related to the discrimination of vibrotactile cues delivered on the index finger, which are associated with the exploration of different sandpapers. Moreover, we performed a pilot experiment with one SoftHand Pro prosthesis user by designing a task, i.e. Active Texture Identification, to investigate if our feedback could enhance users' roughness discrimination. Results indicate that the device can effectively convey contact and texture cues, which users can readily detect and distinguish.