 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling High-Curvature Navigation in Eversion Robots through Buckle-Inducing Constrictive Bands
Jan 18, 2026Tip-growing eversion robots are renowned for their ability to access remote spaces through narrow passages. However, achieving reliable navigation remains a significant challenge. Existing solutions often rely on artificial muscles integrated into the robot body or active tip-steering mechanisms. While effective, these additions introduce structural complexity and compromise the defining advantages of eversion robots: their inherent softness and compliance. In this paper, we propose a passive approach to reduce bending stiffness by purposefully introducing buckling points along the robot's outer wall. We achieve this by integrating inextensible diameter-reducing circumferential bands at regular intervals along the robot body facilitating forward motion through tortuous, obstacle cluttered paths. Rather than relying on active steering, our approach leverages the robot's natural interaction with the environment, allowing for smooth, compliant navigation. We present a Cosserat rod-based mathematical model to quantify this behavior, capturing the local stiffness reductions caused by the constricting bands and their impact on global bending mechanics. Experimental results demonstrate that these bands reduce the robot's stiffness when bent at the tip by up to 91 percent, enabling consistent traversal of 180 degree bends with a bending radius of as low as 25 mm-notably lower than the 35 mm achievable by standard eversion robots under identical conditions. The feasibility of the proposed method is further demonstrated through a case study in a colon phantom. By significantly improving maneuverability without sacrificing softness or increasing mechanical complexity, this approach expands the applicability of eversion robots in highly curved pathways, whether in relation to pipe inspection or medical procedures such as colonoscopy.
Characterization, Experimental Validation and Pilot User Study of the Vibro-Inertial Bionic Enhancement System (VIBES)
Aug 22, 2024



This study presents the characterization and validation of the VIBES, a wearable vibrotactile device that provides high-frequency tactile information embedded in a prosthetic socket. A psychophysical characterization involving ten able-bodied participants is performed to compute the Just Noticeable Difference (JND) related to the discrimination of vibrotactile cues delivered on the skin in two forearm positions, with the goal of optimising vibrotactile actuator position to maximise perceptual response. Furthermore, system performance is validated and tested both with ten able-bodied participants and one prosthesis user considering three tasks. More specifically, in the Active Texture Identification, Slippage and Fragile Object Experiments, we investigate if the VIBES could enhance users' roughness discrimination and manual usability and dexterity. Finally, we test the effect of the vibrotactile system on prosthetic embodiment in a Rubber Hand Illusion (RHI) task. Results show the system's effectiveness in conveying contact and texture cues, making it a potential tool to restore sensory feedback and enhance the embodiment in prosthetic users.
VIBES: Vibro-Inertial Bionic Enhancement System in a Prosthetic Socket
Dec 20, 2023
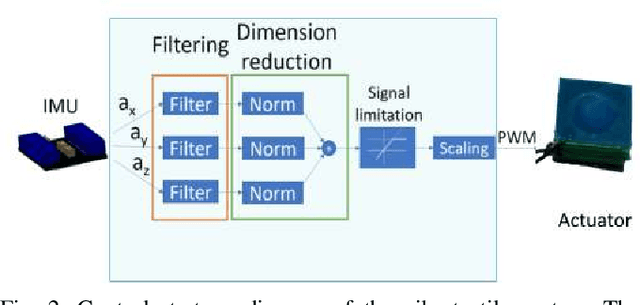

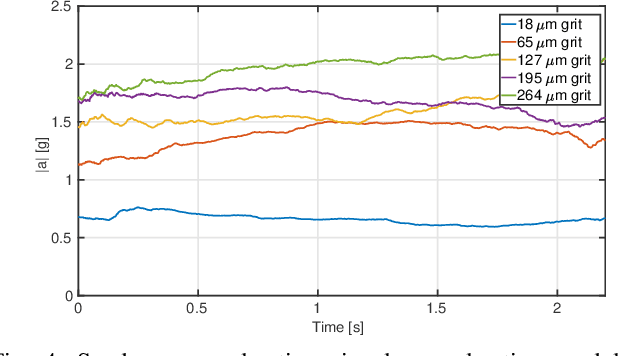
The use of vibrotactile feedback is of growing interest in the field of prosthetics, but few devices fully integrate this technology in the prosthesis to transmit high-frequency contact information (such as surface roughness and first contact) arising from the interaction of the prosthetic device with external items. This study describes a wearable vibrotactile system for high-frequency tactile information embedded in the prosthetic socket. The device consists of two compact planar vibrotactile actuators in direct contact with the user's skin to transmit tactile cues. These stimuli are directly related to the acceleration profiles recorded with two IMUS placed on the distal phalanx of a soft under-actuated robotic prosthesis (SoftHand Pro). We characterized the system from a psychophysical point of view with fifteen able-bodied participants by computing participants' Just Noticeable Difference (JND) related to the discrimination of vibrotactile cues delivered on the index finger, which are associated with the exploration of different sandpapers. Moreover, we performed a pilot experiment with one SoftHand Pro prosthesis user by designing a task, i.e. Active Texture Identification, to investigate if our feedback could enhance users' roughness discrimination. Results indicate that the device can effectively convey contact and texture cues, which users can readily detect and distinguish.