 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling High-Curvature Navigation in Eversion Robots through Buckle-Inducing Constrictive Bands
Jan 18, 2026Tip-growing eversion robots are renowned for their ability to access remote spaces through narrow passages. However, achieving reliable navigation remains a significant challenge. Existing solutions often rely on artificial muscles integrated into the robot body or active tip-steering mechanisms. While effective, these additions introduce structural complexity and compromise the defining advantages of eversion robots: their inherent softness and compliance. In this paper, we propose a passive approach to reduce bending stiffness by purposefully introducing buckling points along the robot's outer wall. We achieve this by integrating inextensible diameter-reducing circumferential bands at regular intervals along the robot body facilitating forward motion through tortuous, obstacle cluttered paths. Rather than relying on active steering, our approach leverages the robot's natural interaction with the environment, allowing for smooth, compliant navigation. We present a Cosserat rod-based mathematical model to quantify this behavior, capturing the local stiffness reductions caused by the constricting bands and their impact on global bending mechanics. Experimental results demonstrate that these bands reduce the robot's stiffness when bent at the tip by up to 91 percent, enabling consistent traversal of 180 degree bends with a bending radius of as low as 25 mm-notably lower than the 35 mm achievable by standard eversion robots under identical conditions. The feasibility of the proposed method is further demonstrated through a case study in a colon phantom. By significantly improving maneuverability without sacrificing softness or increasing mechanical complexity, this approach expands the applicability of eversion robots in highly curved pathways, whether in relation to pipe inspection or medical procedures such as colonoscopy.
Variable Stiffness & Dynamic Force Sensor for Tissue Palpation
Dec 13, 2024Palpation of human tissue during Minimally Invasive Surgery is hampered due to restricted access. In this extended abstract, we present a variable stiffness and dynamic force range sensor that has the potential to address this challenge. The sensor utilises light reflection to estimate sensor deformation, and from this, the force applied. Experimental testing at different pressures (0, 0.5 and 1 PSI) shows that stiffness and force range increases with pressure. The force calibration results when compared with measured forces produced an average RMSE of 0.016, 0.0715 and 0.1284 N respectively, for these pressures.
Colonoscopy Navigation using End-to-End Deep Visuomotor Control: A User Study
Jun 30, 2022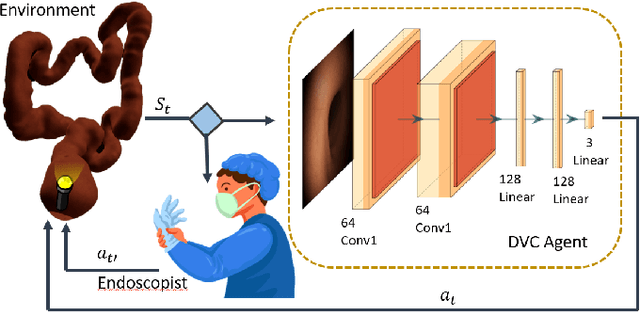
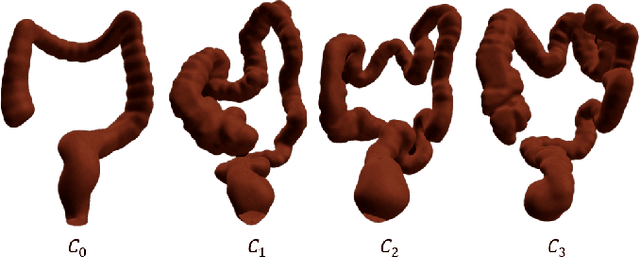
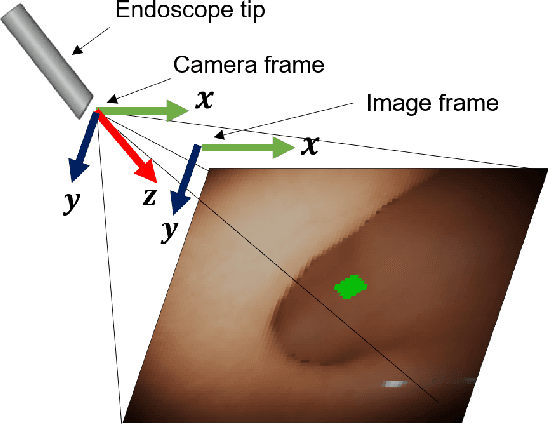
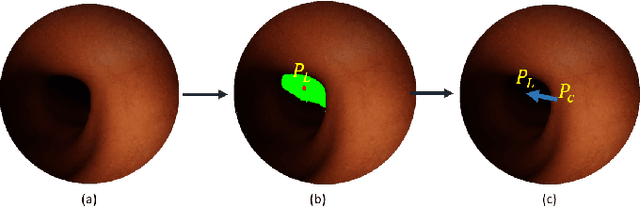
Flexible endoscopes for colonoscopy present several limitations due to their inherent complexity, resulting in patient discomfort and lack of intuitiveness for clinicians. Robotic devices together with autonomous control represent a viable solution to reduce the workload of endoscopists and the training time while improving the overall procedure outcome. Prior works on autonomous endoscope control use heuristic policies that limit their generalisation to the unstructured and highly deformable colon environment and require frequent human intervention. This work proposes an image-based control of the endoscope using Deep Reinforcement Learning, called Deep Visuomotor Control (DVC), to exhibit adaptive behaviour in convoluted sections of the colon tract. DVC learns a mapping between the endoscopic images and the control signal of the endoscope. A first user study of 20 expert gastrointestinal endoscopists was carried out to compare their navigation performance with DVC policies using a realistic virtual simulator. The results indicate that DVC shows equivalent performance on several assessment parameters, being more safer. Moreover, a second user study with 20 novice participants was performed to demonstrate easier human supervision compared to a state-of-the-art heuristic control policy. Seamless supervision of colonoscopy procedures would enable interventionists to focus on the medical decision rather than on the control problem of the endoscope.
Towards a Computed-Aided Diagnosis System in Colonoscopy: Automatic Polyp Segmentation Using Convolution Neural Networks
Jan 15, 2021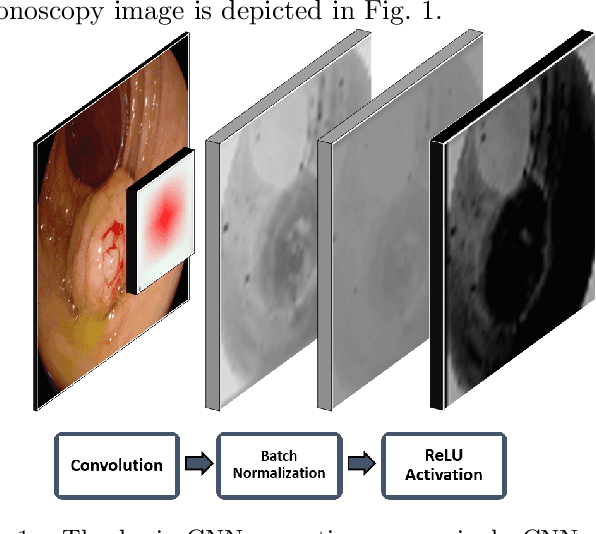
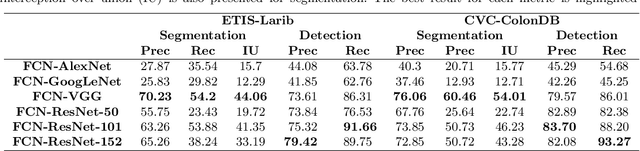
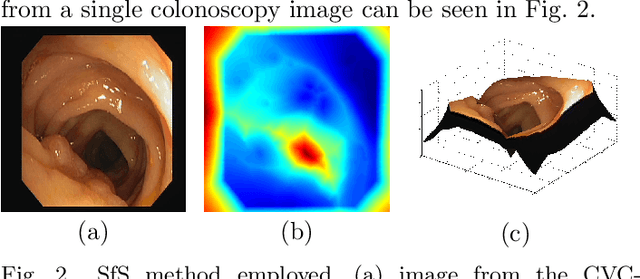

Early diagnosis is essential for the successful treatment of bowel cancers including colorectal cancer (CRC) and capsule endoscopic imaging with robotic actuation can be a valuable diagnostic tool when combined with automated image analysis. We present a deep learning rooted detection and segmentation framework for recognizing lesions in colonoscopy and capsule endoscopy images. We restructure established convolution architectures, such as VGG and ResNets, by converting them into fully-connected convolution networks (FCNs), fine-tune them and study their capabilities for polyp segmentation and detection. We additionally use Shape from-Shading (SfS) to recover depth and provide a richer representation of the tissue's structure in colonoscopy images. Depth is incorporated into our network models as an additional input channel to the RGB information and we demonstrate that the resulting network yields improved performance. Our networks are tested on publicly available datasets and the most accurate segmentation model achieved a mean segmentation IU of 47.78% and 56.95% on the ETIS-Larib and CVC-Colon datasets, respectively. For polyp detection, the top performing models we propose surpass the current state of the art with detection recalls superior to 90% for all datasets tested. To our knowledge, we present the first work to use FCNs for polyp segmentation in addition to proposing a novel combination of SfS and RGB that boosts performance
* 10 pages, 6 figures