 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Soft Robotic Interface for Chick-Robot Affective Interactions
Apr 09, 2026The potential of Animal-Robot Interaction (ARI) in welfare applications depends on how much an animal perceives a robotic agent as socially relevant, non-threatening and potentially attractive (acceptance). Here, we present an animal-centered soft robotic affective interface for newly hatched chicks (Gallus gallus). The soft interface provides safe and controllable cues, including warmth, breathing-like rhythmic deformation, and face-like visual stimuli. We evaluated chick acceptance of the interface and chick-robot interactions by measuring spontaneous approach and touch responses during video tracking. Overall, chicks approached and spent increasing time on or near the interface, demonstrating acceptance of the device. Across different layouts, chicks showed strong preference for warm thermal stimulation, which increased over time. Face-like visual cues elicited a swift and stable preference, speeding up the initial approach to the tactile interface. Although the breathing cue did not elicit any preference, neither did it trigger avoidance, paving the way for further exploration. These findings translate affective interface concepts to ARI, demonstrating that appropriate soft, thermal and visual stimuli can sustain early chick-robot interactions. This work establishes a reliable evaluation protocol and a safe baseline for designing multimodal robotic devices for animal welfare and neuroscientific research.
Human Emotion-Mediated Soft Robotic Arts: Exploring the Intersection of Human Emotions, Soft Robotics and Arts
Feb 13, 2026Soft robotics has emerged as a versatile field with applications across various domains, from healthcare to industrial automation, and more recently, art and interactive installations. The inherent flexibility, adaptability, and safety of soft robots make them ideal for applications that require delicate, organic, and lifelike movement, allowing for immersive and responsive interactions. This study explores the intersection of human emotions, soft robotics, and art to establish and create new forms of human emotion-mediated soft robotic art. In this paper, we introduce two soft embodiments: a soft character and a soft flower as an art display that dynamically responds to brain signals based on alpha waves, reflecting different emotion levels. We present how human emotions can be measured as alpha waves based on brain/EEG signals, how we map the alpha waves to the dynamic movements of the two soft embodiments, and demonstrate our proposed concept using experiments. The findings of this study highlight how soft robotics can embody human emotional states, offering a new medium for insightful artistic expression and interaction, and demonstrating how art displays can be embodied.
6G Empowering Future Robotics: A Vision for Next-Generation Autonomous Systems
Feb 12, 2026The convergence of robotics and next-generation communication is a critical driver of technological advancement. As the world transitions from 5G to 6G, the foundational capabilities of wireless networks are evolving to support increasingly complex and autonomous robotic systems. This paper examines the transformative impact of 6G on enhancing key robotics functionalities. It provides a systematic mapping of IMT-2030 key performance indicators to robotic functional blocks including sensing, perception, cognition, actuation and self-learning. Building upon this mapping, we propose a high-level architectural framework integrating robotic, intelligent, and network service planes, underscoring the need for a holistic approach. As an example use case, we present a real-time, dynamic safety framework enabled by IMT-2030 capabilities for safe and efficient human-robot collaboration in shared spaces.
Enabling High-Curvature Navigation in Eversion Robots through Buckle-Inducing Constrictive Bands
Jan 18, 2026Tip-growing eversion robots are renowned for their ability to access remote spaces through narrow passages. However, achieving reliable navigation remains a significant challenge. Existing solutions often rely on artificial muscles integrated into the robot body or active tip-steering mechanisms. While effective, these additions introduce structural complexity and compromise the defining advantages of eversion robots: their inherent softness and compliance. In this paper, we propose a passive approach to reduce bending stiffness by purposefully introducing buckling points along the robot's outer wall. We achieve this by integrating inextensible diameter-reducing circumferential bands at regular intervals along the robot body facilitating forward motion through tortuous, obstacle cluttered paths. Rather than relying on active steering, our approach leverages the robot's natural interaction with the environment, allowing for smooth, compliant navigation. We present a Cosserat rod-based mathematical model to quantify this behavior, capturing the local stiffness reductions caused by the constricting bands and their impact on global bending mechanics. Experimental results demonstrate that these bands reduce the robot's stiffness when bent at the tip by up to 91 percent, enabling consistent traversal of 180 degree bends with a bending radius of as low as 25 mm-notably lower than the 35 mm achievable by standard eversion robots under identical conditions. The feasibility of the proposed method is further demonstrated through a case study in a colon phantom. By significantly improving maneuverability without sacrificing softness or increasing mechanical complexity, this approach expands the applicability of eversion robots in highly curved pathways, whether in relation to pipe inspection or medical procedures such as colonoscopy.
Differential Analysis of Pseudo Haptic Feedback: Novel Comparative Study of Visual and Auditory Cue Integration for Psychophysical Evaluation
Oct 10, 2025Pseudo-haptics exploit carefully crafted visual or auditory cues to trick the brain into "feeling" forces that are never physically applied, offering a low-cost alternative to traditional haptic hardware. Here, we present a comparative psychophysical study that quantifies how visual and auditory stimuli combine to evoke pseudo-haptic pressure sensations on a commodity tablet. Using a Unity-based Rollball game, participants (n = 4) guided a virtual ball across three textured terrains while their finger forces were captured in real time with a Robotous RFT40 force-torque sensor. Each terrain was paired with a distinct rolling-sound profile spanning 440 Hz - 4.7 kHz, 440 Hz - 13.1 kHz, or 440 Hz - 8.9 kHz; crevice collisions triggered additional "knocking" bursts to heighten realism. Average tactile forces increased systematically with cue intensity: 0.40 N, 0.79 N and 0.88 N for visual-only trials and 0.41 N, 0.81 N and 0.90 N for audio-only trials on Terrains 1-3, respectively. Higher audio frequencies and denser visual textures both elicited stronger muscle activation, and their combination further reduced the force needed to perceive surface changes, confirming multisensory integration. These results demonstrate that consumer-grade isometric devices can reliably induce and measure graded pseudo-haptic feedback without specialized actuators, opening a path toward affordable rehabilitation tools, training simulators and assistive interfaces.
Advancing Embodied Intelligence in Robotic-Assisted Endovascular Procedures: A Systematic Review of AI Solutions
Apr 21, 2025Endovascular procedures have revolutionized the treatment of vascular diseases thanks to minimally invasive solutions that significantly reduce patient recovery time and enhance clinical outcomes. However, the precision and dexterity required during these procedures poses considerable challenges for interventionists. Robotic systems have emerged offering transformative solutions, addressing issues such as operator fatigue, radiation exposure, and the inherent limitations of human precision. The integration of Embodied Intelligence (EI) into these systems signifies a paradigm shift, enabling robots to navigate complex vascular networks and adapt to dynamic physiological conditions. Data-driven approaches, advanced computer vision, medical image analysis, and machine learning techniques, are at the forefront of this evolution. These methods augment procedural intelligence by facilitating real-time vessel segmentation, device tracking, and anatomical landmark detection. Reinforcement learning and imitation learning further refine navigation strategies and replicate experts' techniques. This review systematically examines the integration of EI principles into robotic technologies, in relation to endovascular procedures. We discuss recent advancements in intelligent perception and data-driven control, and their practical applications in robot-assisted endovascular procedures. By critically evaluating current limitations and emerging opportunities, this review establishes a framework for future developments, emphasizing the potential for greater autonomy and improved clinical outcomes. Emerging trends and specific areas of research, such as federated learning for medical data sharing, explainable AI for clinical decision support, and advanced human-robot collaboration paradigms, are also explored, offering insights into the future direction of this rapidly evolving field.
Embedding high-resolution touch across robotic hands enables adaptive human-like grasping
Dec 19, 2024



Developing robotic hands that adapt to real-world dynamics remains a fundamental challenge in robotics and machine intelligence. Despite significant advances in replicating human hand kinematics and control algorithms, robotic systems still struggle to match human capabilities in dynamic environments, primarily due to inadequate tactile feedback. To bridge this gap, we present F-TAC Hand, a biomimetic hand featuring high-resolution tactile sensing (0.1mm spatial resolution) across 70% of its surface area. Through optimized hand design, we overcome traditional challenges in integrating high-resolution tactile sensors while preserving the full range of motion. The hand, powered by our generative algorithm that synthesizes human-like hand configurations, demonstrates robust grasping capabilities in dynamic real-world conditions. Extensive evaluation across 600 real-world trials demonstrates that this tactile-embodied system significantly outperforms non-tactile alternatives in complex manipulation tasks (p<0.0001). These results provide empirical evidence for the critical role of rich tactile embodiment in developing advanced robotic intelligence, offering new perspectives on the relationship between physical sensing capabilities and intelligent behavior.
Variable Stiffness & Dynamic Force Sensor for Tissue Palpation
Dec 13, 2024Palpation of human tissue during Minimally Invasive Surgery is hampered due to restricted access. In this extended abstract, we present a variable stiffness and dynamic force range sensor that has the potential to address this challenge. The sensor utilises light reflection to estimate sensor deformation, and from this, the force applied. Experimental testing at different pressures (0, 0.5 and 1 PSI) shows that stiffness and force range increases with pressure. The force calibration results when compared with measured forces produced an average RMSE of 0.016, 0.0715 and 0.1284 N respectively, for these pressures.
Haptic Stiffness Perception Using Hand Exoskeletons in Tactile Robotic Telemanipulation
Dec 03, 2024Robotic telemanipulation - the human-guided manipulation of remote objects - plays a pivotal role in several applications, from healthcare to operations in harsh environments. While visual feedback from cameras can provide valuable information to the human operator, haptic feedback is essential for accessing specific object properties that are difficult to be perceived by vision, such as stiffness. For the first time, we present a participant study demonstrating that operators can perceive the stiffness of remote objects during real-world telemanipulation with a dexterous robotic hand, when haptic feedback is generated from tactile sensing fingertips. Participants were tasked with squeezing soft objects by teleoperating a robotic hand, using two methods of haptic feedback: one based solely on the measured contact force, while the second also includes the squeezing displacement between the leader and follower devices. Our results demonstrate that operators are indeed capable of discriminating objects of different stiffness, relying on haptic feedback alone and without any visual feedback. Additionally, our findings suggest that the displacement feedback component may enhance discrimination with objects of similar stiffness.
Leveraging Tactile Sensing to Render both Haptic Feedback and Virtual Reality 3D Object Reconstruction in Robotic Telemanipulation
Dec 03, 2024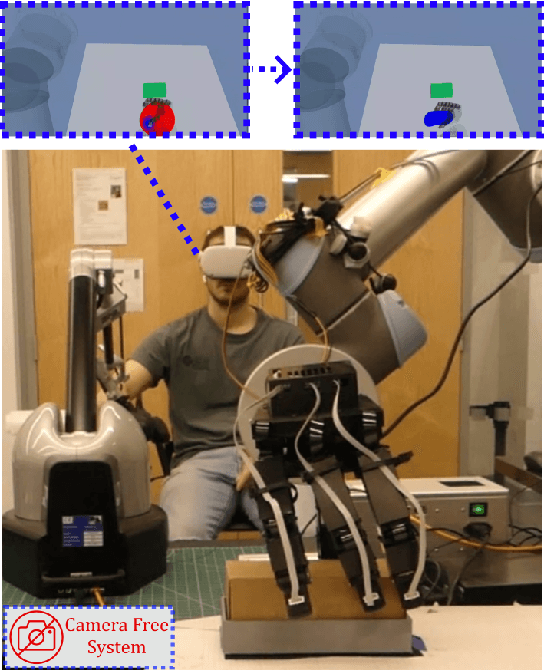


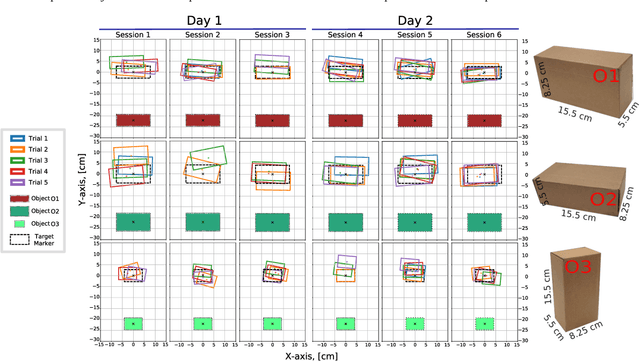
Dexterous robotic manipulator teleoperation is widely used in many applications, either where it is convenient to keep the human inside the control loop, or to train advanced robot agents. So far, this technology has been used in combination with camera systems with remarkable success. On the other hand, only a limited number of studies have focused on leveraging haptic feedback from tactile sensors in contexts where camera-based systems fail, such as due to self-occlusions or poor light conditions like smoke. This study demonstrates the feasibility of precise pick-and-place teleoperation without cameras by leveraging tactile-based 3D object reconstruction in VR and providing haptic feedback to a blindfolded user. Our preliminary results show that integrating these technologies enables the successful completion of telemanipulation tasks previously dependent on cameras, paving the way for more complex future applications.