 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHydraulic Volumetric Soft Everting Vine Robot Steering Mechanism for Underwater Exploration
Sep 25, 2024



Despite a significant proportion of the Earth being covered in water, exploration of what lies below has been limited due to the challenges and difficulties inherent in the process. Current state of the art robots such as Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs) are bulky, rigid and unable to conform to their environment. Soft robotics offers solutions to this issue. Fluid-actuated eversion or growing robots, in particular, are a good example. While current eversion robots have found many applications on land, their inherent properties make them particularly well suited to underwater environments. An important factor when considering underwater eversion robots is the establishment of a suitable steering mechanism that can enable the robot to change direction as required. This project proposes a design for an eversion robot that is capable of steering while underwater, through the use of bending pouches, a design commonly seen in the literature on land-based eversion robots. These bending pouches contract to enable directional change. Similar to their land-based counterparts, the underwater eversion robot uses the same fluid in the medium it operates in to achieve extension and bending but also to additionally aid in neutral buoyancy. The actuation method of bending pouches meant that robots needed to fully extend before steering was possible. Three robots, with the same design and dimensions were constructed from polyethylene tubes and tested. Our research shows that although the soft eversion robot design in this paper was not capable of consistently generating the same amounts of bending for the inflation volume, it still achieved suitable bending at a range of inflation volumes and was observed to bend to a maximum angle of 68 degrees at 2000 ml, which is in line with the bending angles reported for land-based eversion robots in the literature.
Deformable Tip Mount for Soft Growing Eversion Robots
Jan 15, 2024Here we present a flexible tip mount for eversion (vine) robots. This soft cap allows attaching a payload to an eversion robot while allowing moving through narrow openings, as well as the eversion of protruding objects, and expanded surfaces.
Soft Cap for Eversion Robots
Jan 30, 2023
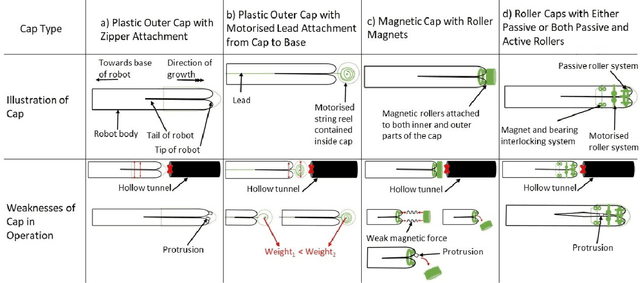
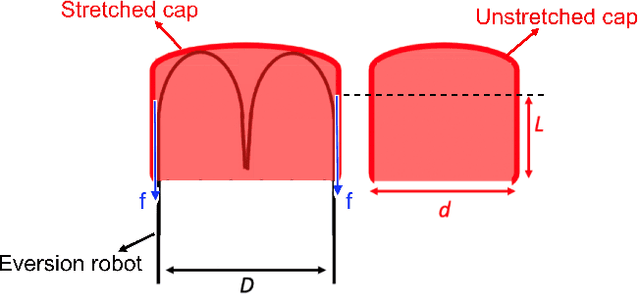
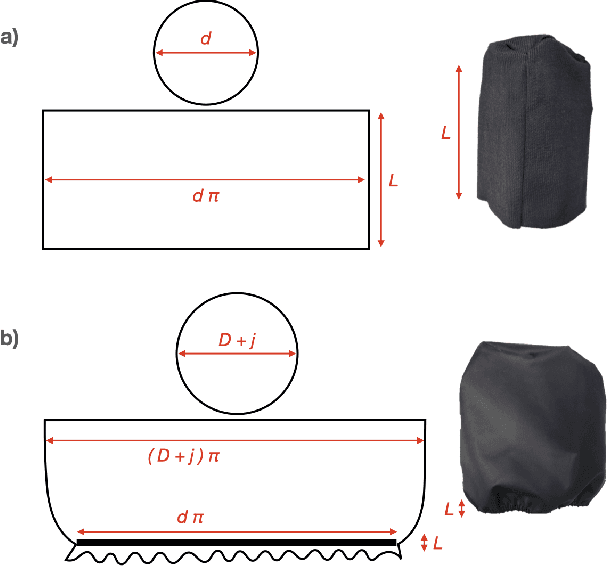
Growing robots based on the eversion principle are known for their ability to extend rapidly, from within, along their longitudinal axis, and, in doing so, reach deep into hitherto inaccessible, remote spaces. Despite many advantages, eversion robots also present significant challenges, one of which is maintaining sensory payload at the tip without restricting the eversion process. A variety of tip mechanisms has been proposed by the robotics community, among them rounded caps of relatively complex construction that are not always compatible with functional hardware, such as sensors or navigation pouches, integrated with the main eversion structure. Moreover, many tip designs incorporate rigid materials, reducing the robot's flexibility and consequent ability to navigate through narrow openings. Here, we address these shortcomings and propose a design to overcome them: a soft, entirely fabric based, cylindrical cap that can easily be slipped onto the tip of eversion robots. Having created a series of caps of different sizes and materials, an experimental study was conducted to evaluate our new design in terms of four key aspects: eversion robot made from multiple layers of everting material, solid objects protruding from the eversion robot, squeezability, and navigability. In all scenarios, we can show that our soft, flexible cap is robust in its ability to maintain its position and is capable of transporting payloads such as a camera across long distances.