 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA User Study Method on Healthy Participants for Assessing an Assistive Wearable Robot Utilising EMG Sensing
Jul 31, 2024


Hand-wearable robots, specifically exoskeletons, are designed to aid hands in daily activities, playing a crucial role in post-stroke rehabilitation and assisting the elderly. Our contribution to this field is a textile robotic glove with integrated actuators. These actuators, powered by pneumatic pressure, guide the user's hand to a desired position. Crafted from textile materials, our soft robotic glove prioritizes safety, lightweight construction, and user comfort. Utilizing the ruffles technique, integrated actuators guarantee high performance in blocking force and bending effectiveness. Here, we present a participant study confirming the effectiveness of our robotic device on a healthy participant group, exploiting EMG sensing.
* 3 pages, 4 figures, conference. arXiv admin note: text overlap with arXiv:2305.17720
Deformable Tip Mount for Soft Growing Eversion Robots
Jan 15, 2024Here we present a flexible tip mount for eversion (vine) robots. This soft cap allows attaching a payload to an eversion robot while allowing moving through narrow openings, as well as the eversion of protruding objects, and expanded surfaces.
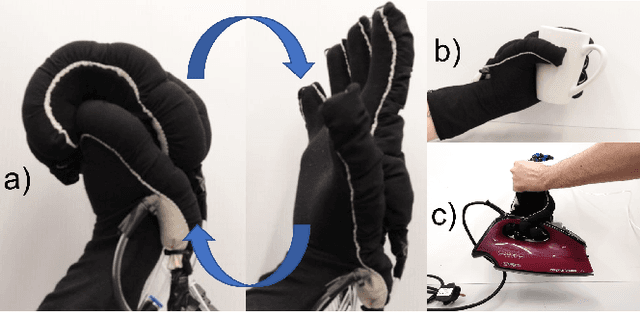
Integrating Elastic Bands to Enhance Performance for Textile Robotics
May 28, 2023The elastic bands integrated using the ruffles technique proved to be effective in enhancing the performance of the soft robotic structures. In the actuator application, the elastic bands greatly increased the bending capability and force capability of the structure, while in the eversion robot cap application, the elastic bands improved the performance slightly by maintaining the sensory payload at the tip without restricting the eversion process. These findings demonstrate the potential of using elastic bands and textile techniques in soft robotics to create more efficient and adaptable structures.
Soft Cap for Eversion Robots
Jan 30, 2023
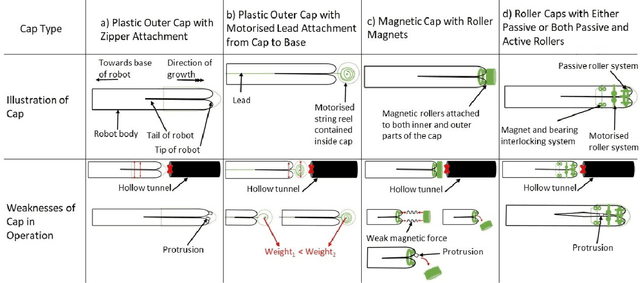
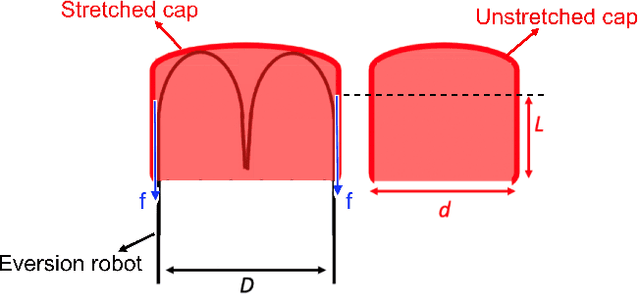
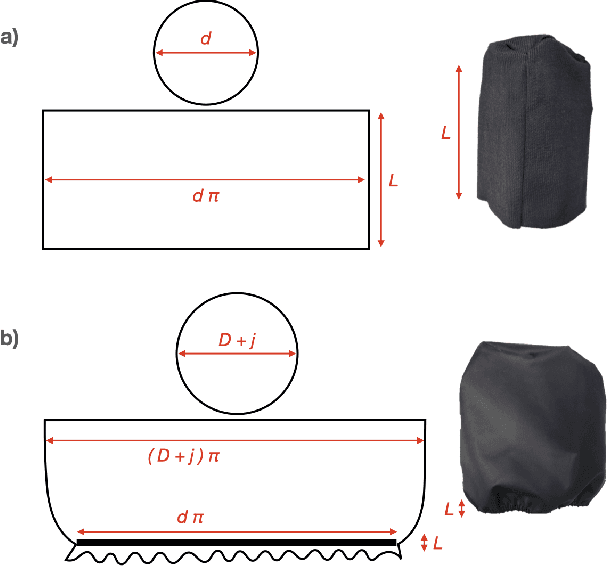
Growing robots based on the eversion principle are known for their ability to extend rapidly, from within, along their longitudinal axis, and, in doing so, reach deep into hitherto inaccessible, remote spaces. Despite many advantages, eversion robots also present significant challenges, one of which is maintaining sensory payload at the tip without restricting the eversion process. A variety of tip mechanisms has been proposed by the robotics community, among them rounded caps of relatively complex construction that are not always compatible with functional hardware, such as sensors or navigation pouches, integrated with the main eversion structure. Moreover, many tip designs incorporate rigid materials, reducing the robot's flexibility and consequent ability to navigate through narrow openings. Here, we address these shortcomings and propose a design to overcome them: a soft, entirely fabric based, cylindrical cap that can easily be slipped onto the tip of eversion robots. Having created a series of caps of different sizes and materials, an experimental study was conducted to evaluate our new design in terms of four key aspects: eversion robot made from multiple layers of everting material, solid objects protruding from the eversion robot, squeezability, and navigability. In all scenarios, we can show that our soft, flexible cap is robust in its ability to maintain its position and is capable of transporting payloads such as a camera across long distances.
A Fabric Soft Robotic Exoskeleton with Novel Elastic Band Integrated Actuators for Hand Rehabilitation
Dec 14, 2022Common disabilities like stroke and spinal cord injuries may cause loss of motor function in hands. They can be treated with robot assisted rehabilitation techniques, like continuously opening and closing the hand with help of a robot, in a cheaper, and less time consuming manner than traditional methods. Hand exoskeletons are developed to assist rehabilitation, but their bulky nature brings with it certain challenges. As soft robots use elastomeric and fabric elements rather than heavy links, and operate with pneumatic, hydraulic or tendon based rather than traditional rotary or linear motors, soft hand exoskeletons are deemed a better option in relation to rehabilitation.
* 2 pages, 4 figures, conference