 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Stiffness Perception Using Hand Exoskeletons in Tactile Robotic Telemanipulation
Dec 03, 2024Robotic telemanipulation - the human-guided manipulation of remote objects - plays a pivotal role in several applications, from healthcare to operations in harsh environments. While visual feedback from cameras can provide valuable information to the human operator, haptic feedback is essential for accessing specific object properties that are difficult to be perceived by vision, such as stiffness. For the first time, we present a participant study demonstrating that operators can perceive the stiffness of remote objects during real-world telemanipulation with a dexterous robotic hand, when haptic feedback is generated from tactile sensing fingertips. Participants were tasked with squeezing soft objects by teleoperating a robotic hand, using two methods of haptic feedback: one based solely on the measured contact force, while the second also includes the squeezing displacement between the leader and follower devices. Our results demonstrate that operators are indeed capable of discriminating objects of different stiffness, relying on haptic feedback alone and without any visual feedback. Additionally, our findings suggest that the displacement feedback component may enhance discrimination with objects of similar stiffness.
Leveraging Tactile Sensing to Render both Haptic Feedback and Virtual Reality 3D Object Reconstruction in Robotic Telemanipulation
Dec 03, 2024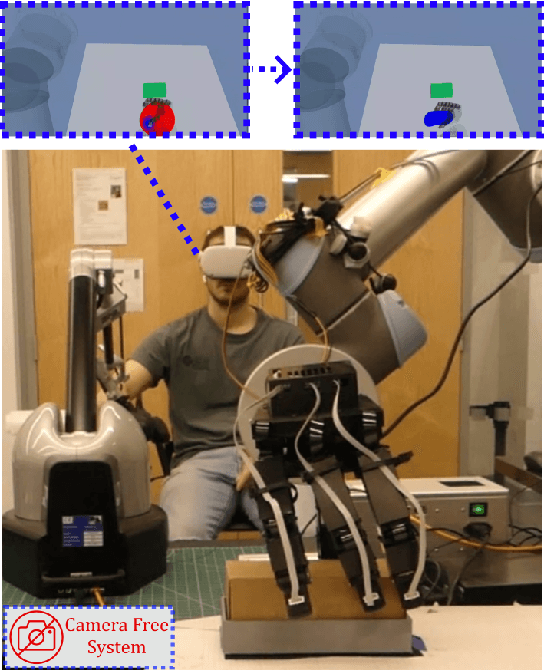


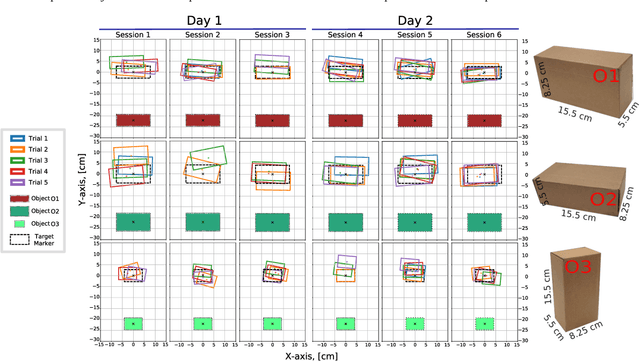
Dexterous robotic manipulator teleoperation is widely used in many applications, either where it is convenient to keep the human inside the control loop, or to train advanced robot agents. So far, this technology has been used in combination with camera systems with remarkable success. On the other hand, only a limited number of studies have focused on leveraging haptic feedback from tactile sensors in contexts where camera-based systems fail, such as due to self-occlusions or poor light conditions like smoke. This study demonstrates the feasibility of precise pick-and-place teleoperation without cameras by leveraging tactile-based 3D object reconstruction in VR and providing haptic feedback to a blindfolded user. Our preliminary results show that integrating these technologies enables the successful completion of telemanipulation tasks previously dependent on cameras, paving the way for more complex future applications.
DexSkills: Skill Segmentation Using Haptic Data for Learning Autonomous Long-Horizon Robotic Manipulation Tasks
May 06, 2024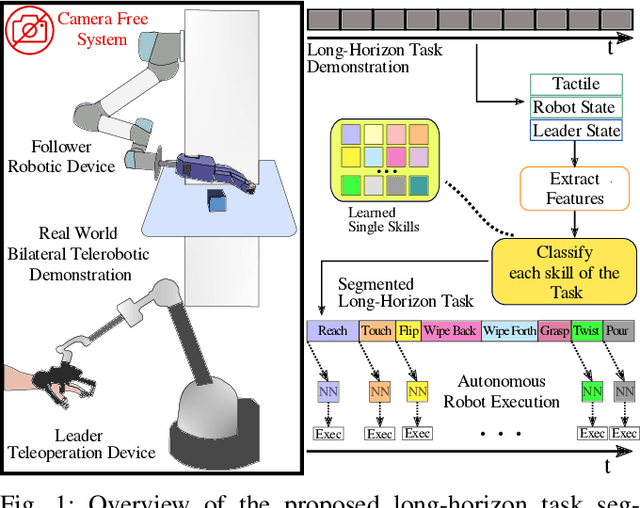
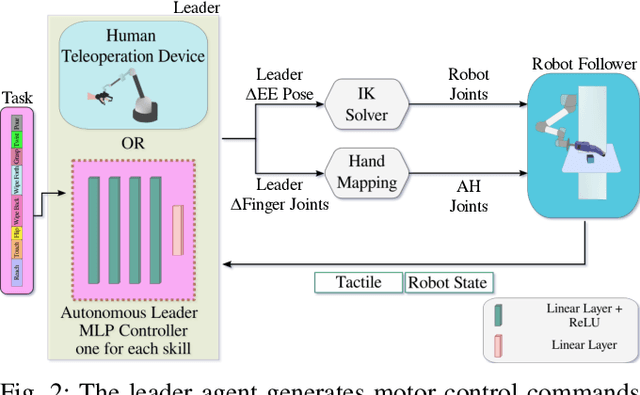
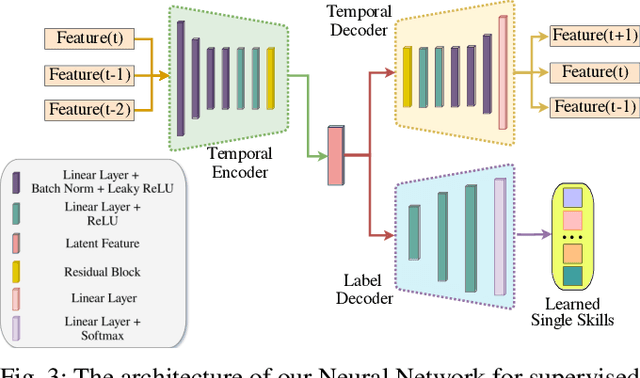
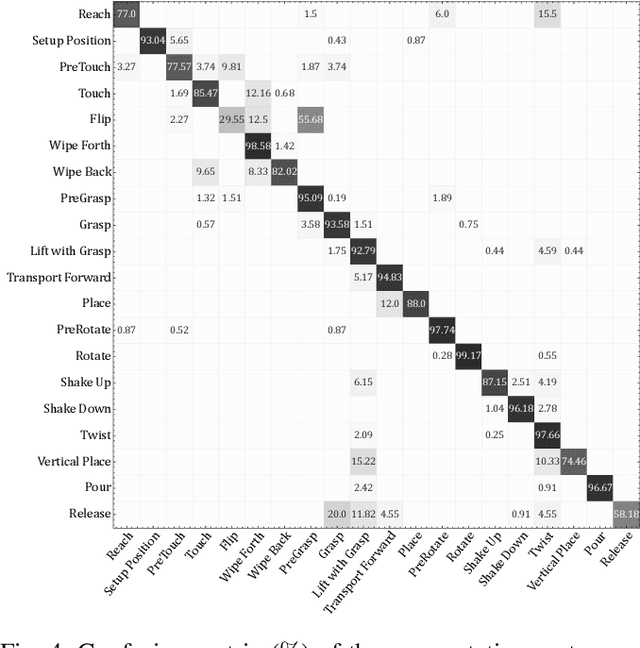
Effective execution of long-horizon tasks with dexterous robotic hands remains a significant challenge in real-world problems. While learning from human demonstrations have shown encouraging results, they require extensive data collection for training. Hence, decomposing long-horizon tasks into reusable primitive skills is a more efficient approach. To achieve so, we developed DexSkills, a novel supervised learning framework that addresses long-horizon dexterous manipulation tasks using primitive skills. DexSkills is trained to recognize and replicate a select set of skills using human demonstration data, which can then segment a demonstrated long-horizon dexterous manipulation task into a sequence of primitive skills to achieve one-shot execution by the robot directly. Significantly, DexSkills operates solely on proprioceptive and tactile data, i.e., haptic data. Our real-world robotic experiments show that DexSkills can accurately segment skills, thereby enabling autonomous robot execution of a diverse range of tasks.