 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Coronary Artery Registration Method Based on Super-pixel Particle Swarm Optimization
May 30, 2025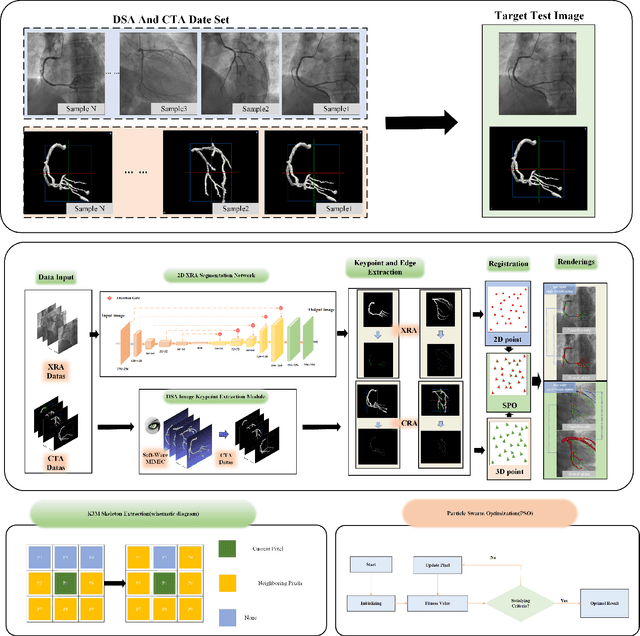
Percutaneous Coronary Intervention (PCI) is a minimally invasive procedure that improves coronary blood flow and treats coronary artery disease. Although PCI typically requires 2D X-ray angiography (XRA) to guide catheter placement at real-time, computed tomography angiography (CTA) may substantially improve PCI by providing precise information of 3D vascular anatomy and status. To leverage real-time XRA and detailed 3D CTA anatomy for PCI, accurate multimodal image registration of XRA and CTA is required, to guide the procedure and avoid complications. This is a challenging process as it requires registration of images from different geometrical modalities (2D -> 3D and vice versa), with variations in contrast and noise levels. In this paper, we propose a novel multimodal coronary artery image registration method based on a swarm optimization algorithm, which effectively addresses challenges such as large deformations, low contrast, and noise across these imaging modalities. Our algorithm consists of two main modules: 1) preprocessing of XRA and CTA images separately, and 2) a registration module based on feature extraction using the Steger and Superpixel Particle Swarm Optimization algorithms. Our technique was evaluated on a pilot dataset of 28 pairs of XRA and CTA images from 10 patients who underwent PCI. The algorithm was compared with four state-of-the-art (SOTA) methods in terms of registration accuracy, robustness, and efficiency. Our method outperformed the selected SOTA baselines in all aspects. Experimental results demonstrate the significant effectiveness of our algorithm, surpassing the previous benchmarks and proposes a novel clinical approach that can potentially have merit for improving patient outcomes in coronary artery disease.
DPNet: Dynamic Pooling Network for Tiny Object Detection
May 05, 2025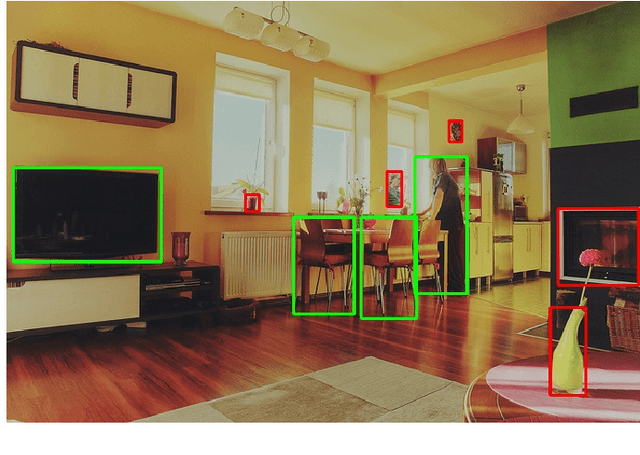
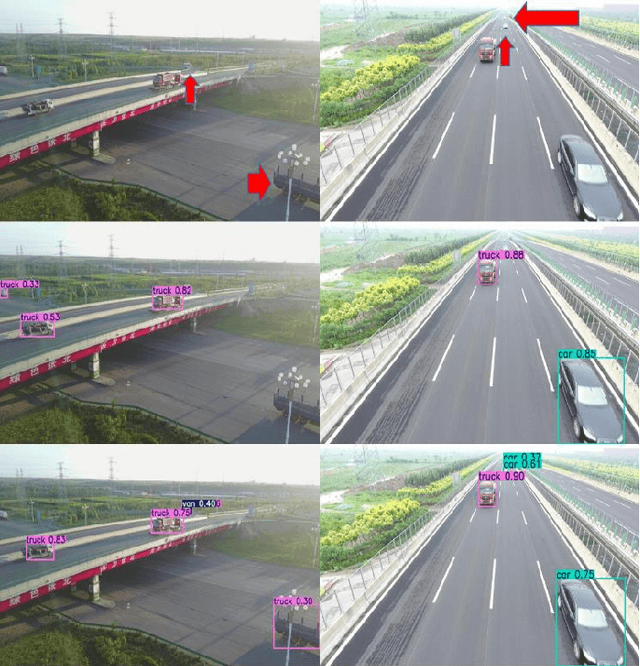
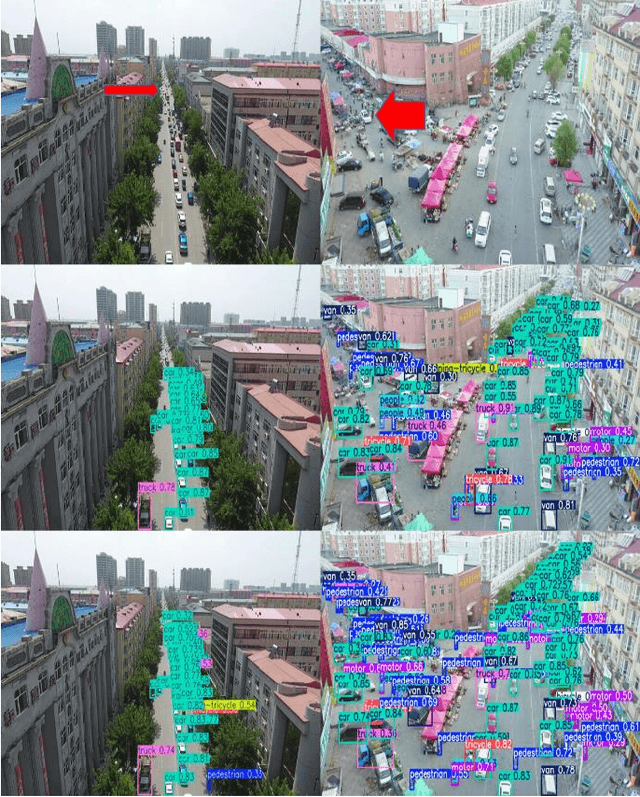
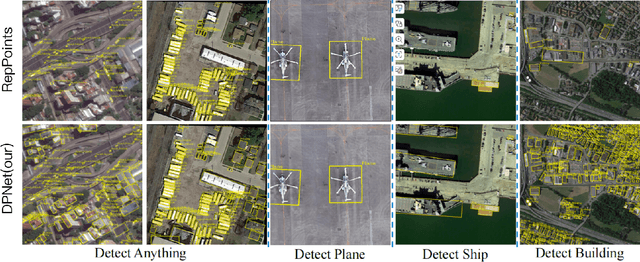
In unmanned aerial systems, especially in complex environments, accurately detecting tiny objects is crucial. Resizing images is a common strategy to improve detection accuracy, particularly for small objects. However, simply enlarging images significantly increases computational costs and the number of negative samples, severely degrading detection performance and limiting its applicability. This paper proposes a Dynamic Pooling Network (DPNet) for tiny object detection to mitigate these issues. DPNet employs a flexible down-sampling strategy by introducing a factor (df) to relax the fixed downsampling process of the feature map to an adjustable one. Furthermore, we design a lightweight predictor to predict df for each input image, which is used to decrease the resolution of feature maps in the backbone. Thus, we achieve input-aware downsampling. We also design an Adaptive Normalization Module (ANM) to make a unified detector compatible with different dfs. A guidance loss supervises the predictor's training. DPNet dynamically allocates computing resources to trade off between detection accuracy and efficiency. Experiments on the TinyCOCO and TinyPerson datasets show that DPNet can save over 35% and 25% GFLOPs, respectively, while maintaining comparable detection performance. The code will be made publicly available.
Advancing Embodied Intelligence in Robotic-Assisted Endovascular Procedures: A Systematic Review of AI Solutions
Apr 21, 2025Endovascular procedures have revolutionized the treatment of vascular diseases thanks to minimally invasive solutions that significantly reduce patient recovery time and enhance clinical outcomes. However, the precision and dexterity required during these procedures poses considerable challenges for interventionists. Robotic systems have emerged offering transformative solutions, addressing issues such as operator fatigue, radiation exposure, and the inherent limitations of human precision. The integration of Embodied Intelligence (EI) into these systems signifies a paradigm shift, enabling robots to navigate complex vascular networks and adapt to dynamic physiological conditions. Data-driven approaches, advanced computer vision, medical image analysis, and machine learning techniques, are at the forefront of this evolution. These methods augment procedural intelligence by facilitating real-time vessel segmentation, device tracking, and anatomical landmark detection. Reinforcement learning and imitation learning further refine navigation strategies and replicate experts' techniques. This review systematically examines the integration of EI principles into robotic technologies, in relation to endovascular procedures. We discuss recent advancements in intelligent perception and data-driven control, and their practical applications in robot-assisted endovascular procedures. By critically evaluating current limitations and emerging opportunities, this review establishes a framework for future developments, emphasizing the potential for greater autonomy and improved clinical outcomes. Emerging trends and specific areas of research, such as federated learning for medical data sharing, explainable AI for clinical decision support, and advanced human-robot collaboration paradigms, are also explored, offering insights into the future direction of this rapidly evolving field.
Ultrasound-Guided Robotic Blood Drawing and In Vivo Studies on Submillimetre Vessels of Rats
Apr 04, 2025Billions of vascular access procedures are performed annually worldwide, serving as a crucial first step in various clinical diagnostic and therapeutic procedures. For pediatric or elderly individuals, whose vessels are small in size (typically 2 to 3 mm in diameter for adults and less than 1 mm in children), vascular access can be highly challenging. This study presents an image-guided robotic system aimed at enhancing the accuracy of difficult vascular access procedures. The system integrates a 6-DoF robotic arm with a 3-DoF end-effector, ensuring precise navigation and needle insertion. Multi-modal imaging and sensing technologies have been utilized to endow the medical robot with precision and safety, while ultrasound imaging guidance is specifically evaluated in this study. To evaluate in vivo vascular access in submillimeter vessels, we conducted ultrasound-guided robotic blood drawing on the tail veins (with a diameter of 0.7 plus or minus 0.2 mm) of 40 rats. The results demonstrate that the system achieved a first-attempt success rate of 95 percent. The high first-attempt success rate in intravenous vascular access, even with small blood vessels, demonstrates the system's effectiveness in performing these procedures. This capability reduces the risk of failed attempts, minimizes patient discomfort, and enhances clinical efficiency.
Sim4EndoR: A Reinforcement Learning Centered Simulation Platform for Task Automation of Endovascular Robotics
Apr 04, 2025Robotic-assisted percutaneous coronary intervention (PCI) holds considerable promise for elevating precision and safety in cardiovascular procedures. Nevertheless, current systems heavily depend on human operators, resulting in variability and the potential for human error. To tackle these challenges, Sim4EndoR, an innovative reinforcement learning (RL) based simulation environment, is first introduced to bolster task-level autonomy in PCI. This platform offers a comprehensive and risk-free environment for the development, evaluation, and refinement of potential autonomous systems, enhancing data collection efficiency and minimizing the need for costly hardware trials. A notable aspect of the groundbreaking Sim4EndoR is its reward function, which takes into account the anatomical constraints of the vascular environment, utilizing the geometric characteristics of vessels to steer the learning process. By seamlessly integrating advanced physical simulations with neural network-driven policy learning, Sim4EndoR fosters efficient sim-to-real translation, paving the way for safer, more consistent robotic interventions in clinical practice, ultimately improving patient outcomes.
Deep Learning for Personalized Electrocardiogram Diagnosis: A Review
Sep 12, 2024The electrocardiogram (ECG) remains a fundamental tool in cardiac diagnostics, yet its interpretation traditionally reliant on the expertise of cardiologists. The emergence of deep learning has heralded a revolutionary era in medical data analysis, particularly in the domain of ECG diagnostics. However, inter-patient variability prohibit the generalibility of ECG-AI model trained on a population dataset, hence degrade the performance of ECG-AI on specific patient or patient group. Many studies have address this challenge using different deep learning technologies. This comprehensive review systematically synthesizes research from a wide range of studies to provide an in-depth examination of cutting-edge deep-learning techniques in personalized ECG diagnosis. The review outlines a rigorous methodology for the selection of pertinent scholarly articles and offers a comprehensive overview of deep learning approaches applied to personalized ECG diagnostics. Moreover, the challenges these methods encounter are investigated, along with future research directions, culminating in insights into how the integration of deep learning can transform personalized ECG diagnosis and enhance cardiac care. By emphasizing both the strengths and limitations of current methodologies, this review underscores the immense potential of deep learning to refine and redefine ECG analysis in clinical practice, paving the way for more accurate, efficient, and personalized cardiac diagnostics.