 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA data-physics hybrid generative model for patient-specific post-stroke motor rehabilitation using wearable sensor data
Dec 16, 2025Dynamic prediction of locomotor capacity after stroke is crucial for tailoring rehabilitation, yet current assessments provide only static impairment scores and do not indicate whether patients can safely perform specific tasks such as slope walking or stair climbing. Here, we develop a data-physics hybrid generative framework that reconstructs an individual stroke survivor's neuromuscular control from a single 20 m level-ground walking trial and predicts task-conditioned locomotion across rehabilitation scenarios. The system combines wearable-sensor kinematics, a proportional-derivative physics controller, a population Healthy Motion Atlas, and goal-conditioned deep reinforcement learning with behaviour cloning and generative adversarial imitation learning to generate physically plausible, patient-specific gait simulations for slopes and stairs. In 11 stroke survivors, the personalized controllers preserved idiosyncratic gait patterns while improving joint-angle and endpoint fidelity by 4.73% and 12.10%, respectively, and reducing training time to 25.56% relative to a physics-only baseline. In a multicentre pilot involving 21 inpatients, clinicians who used our locomotion predictions to guide task selection and difficulty obtained larger gains in Fugl-Meyer lower-extremity scores over 28 days of standard rehabilitation than control clinicians (mean change 6.0 versus 3.7 points). These findings indicate that our generative, task-predictive framework can augment clinical decision-making in post-stroke gait rehabilitation and provide a template for dynamically personalized motor recovery strategies.
Advancing Embodied Intelligence in Robotic-Assisted Endovascular Procedures: A Systematic Review of AI Solutions
Apr 21, 2025Endovascular procedures have revolutionized the treatment of vascular diseases thanks to minimally invasive solutions that significantly reduce patient recovery time and enhance clinical outcomes. However, the precision and dexterity required during these procedures poses considerable challenges for interventionists. Robotic systems have emerged offering transformative solutions, addressing issues such as operator fatigue, radiation exposure, and the inherent limitations of human precision. The integration of Embodied Intelligence (EI) into these systems signifies a paradigm shift, enabling robots to navigate complex vascular networks and adapt to dynamic physiological conditions. Data-driven approaches, advanced computer vision, medical image analysis, and machine learning techniques, are at the forefront of this evolution. These methods augment procedural intelligence by facilitating real-time vessel segmentation, device tracking, and anatomical landmark detection. Reinforcement learning and imitation learning further refine navigation strategies and replicate experts' techniques. This review systematically examines the integration of EI principles into robotic technologies, in relation to endovascular procedures. We discuss recent advancements in intelligent perception and data-driven control, and their practical applications in robot-assisted endovascular procedures. By critically evaluating current limitations and emerging opportunities, this review establishes a framework for future developments, emphasizing the potential for greater autonomy and improved clinical outcomes. Emerging trends and specific areas of research, such as federated learning for medical data sharing, explainable AI for clinical decision support, and advanced human-robot collaboration paradigms, are also explored, offering insights into the future direction of this rapidly evolving field.
A Unified Platform for At-Home Post-Stroke Rehabilitation Enabled by Wearable Technologies and Artificial Intelligence
Nov 28, 2024



At-home rehabilitation for post-stroke patients presents significant challenges, as continuous, personalized care is often limited outside clinical settings. Additionally, the absence of comprehensive solutions addressing diverse rehabilitation needs in home environments complicates recovery efforts. Here, we introduce a smart home platform that integrates wearable sensors, ambient monitoring, and large language model (LLM)-powered assistance to provide seamless health monitoring and intelligent support. The system leverages machine learning enabled plantar pressure arrays for motor recovery assessment (94% classification accuracy), a wearable eye-tracking module for cognitive evaluation, and ambient sensors for precise smart home control (100% operational success, <1 s latency). Additionally, the LLM-powered agent, Auto-Care, offers real-time interventions, such as health reminders and environmental adjustments, enhancing user satisfaction by 29%. This work establishes a fully integrated platform for long-term, personalized rehabilitation, offering new possibilities for managing chronic conditions and supporting aging populations.
Deep Learning-Based Longitudinal Prediction of Childhood Myopia Progression Using Fundus Image Sequences and Baseline Refraction Data
Jul 31, 2024

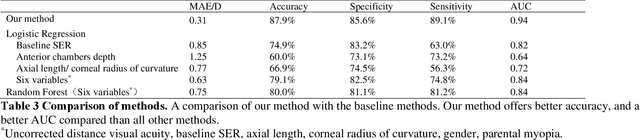
Childhood myopia constitutes a significant global health concern. It exhibits an escalating prevalence and has the potential to evolve into severe, irreversible conditions that detrimentally impact familial well-being and create substantial economic costs. Contemporary research underscores the importance of precisely predicting myopia progression to enable timely and effective interventions, thereby averting severe visual impairment in children. Such predictions predominantly rely on subjective clinical assessments, which are inherently biased and resource-intensive, thus hindering their widespread application. In this study, we introduce a novel, high-accuracy method for quantitatively predicting the myopic trajectory and myopia risk in children using only fundus images and baseline refraction data. This approach was validated through a six-year longitudinal study of 3,408 children in Henan, utilizing 16,211 fundus images and corresponding refractive data. Our method based on deep learning demonstrated predictive accuracy with an error margin of 0.311D per year and AUC scores of 0.944 and 0.995 for forecasting the risks of developing myopia and high myopia, respectively. These findings confirm the utility of our model in supporting early intervention strategies and in significantly reducing healthcare costs, particularly by obviating the need for additional metadata and repeated consultations. Furthermore, our method was designed to rely only on fundus images and refractive error data, without the need for meta data or multiple inquiries from doctors, strongly reducing the associated medical costs and facilitating large-scale screening. Our model can even provide good predictions based on only a single time measurement. Consequently, the proposed method is an important means to reduce medical inequities caused by economic disparities.
Intelligent machines work in unstructured environments by differential neural computing
Oct 03, 2023Expecting intelligent machines to efficiently work in real world requires a new method to understand unstructured information in unknown environments with good accuracy, scalability and generalization, like human. Here, a memristive neural computing based perceptual signal differential processing and learning method for intelligent machines is presented, via extracting main features of environmental information and applying associated encoded stimuli to memristors, we successfully obtain human-like ability in processing unstructured environmental information, such as amplification (>720%) and adaptation (<50%) of mechanical stimuli. The method also exhibits good scalability and generalization, validated in two typical applications of intelligent machines: object grasping and autonomous driving. In the former, a robot hand experimentally realizes safe and stable grasping, through learning unknown object features (e.g., sharp corner and smooth surface) with a single memristor in 1 ms. In the latter, the decision-making information of 10 unstructured environments in autonomous driving (e.g., overtaking cars, pedestrians) are accurately (94%) extracted with a 40x25 memristor array. By mimicking the intrinsic nature of human low-level perception mechanisms in electronic memristive neural circuits, the proposed method is adaptable to diverse sensing technologies, helping intelligent machines to generate smart high-level decisions in real world.