 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Information-Guided Spatio-Temporal Mamba for Stock Time Series Forecasting
Mar 14, 2025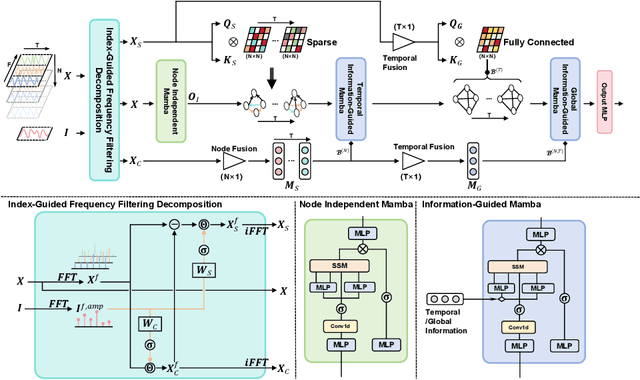


Mamba has demonstrated excellent performance in various time series forecasting tasks due to its superior selection mechanism. Nevertheless, conventional Mamba-based models encounter significant challenges in accurately predicting stock time series, as they fail to adequately capture both the overarching market dynamics and the intricate interdependencies among individual stocks. To overcome these constraints, we introduce the Hierarchical Information-Guided Spatio-Temporal Mamba (HIGSTM) framework. HIGSTM introduces Index-Guided Frequency Filtering Decomposition to extract commonality and specificity from time series. The model architecture features a meticulously designed hierarchical framework that systematically captures both temporal dynamic patterns and global static relationships within the stock market. Furthermore, we propose an Information-Guided Mamba that integrates macro informations into the sequence selection process, thereby facilitating more market-conscious decision-making. Comprehensive experimental evaluations conducted on the CSI500, CSI800 and CSI1000 datasets demonstrate that HIGSTM achieves state-of-the-art performance.
Intelligent machines work in unstructured environments by differential neural computing
Oct 03, 2023Expecting intelligent machines to efficiently work in real world requires a new method to understand unstructured information in unknown environments with good accuracy, scalability and generalization, like human. Here, a memristive neural computing based perceptual signal differential processing and learning method for intelligent machines is presented, via extracting main features of environmental information and applying associated encoded stimuli to memristors, we successfully obtain human-like ability in processing unstructured environmental information, such as amplification (>720%) and adaptation (<50%) of mechanical stimuli. The method also exhibits good scalability and generalization, validated in two typical applications of intelligent machines: object grasping and autonomous driving. In the former, a robot hand experimentally realizes safe and stable grasping, through learning unknown object features (e.g., sharp corner and smooth surface) with a single memristor in 1 ms. In the latter, the decision-making information of 10 unstructured environments in autonomous driving (e.g., overtaking cars, pedestrians) are accurately (94%) extracted with a 40x25 memristor array. By mimicking the intrinsic nature of human low-level perception mechanisms in electronic memristive neural circuits, the proposed method is adaptable to diverse sensing technologies, helping intelligent machines to generate smart high-level decisions in real world.