 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimely reliable Bayesian decision-making enabled using memristors
Dec 07, 2024Brains perform timely reliable decision-making by Bayes theorem. Bayes theorem quantifies events as probabilities and, through probability rules, renders the decisions. Learning from this, applying Bayes theorem in practical problems can visualize the potential risks and decision confidence, thereby enabling efficient user-scene interactions. However, given the probabilistic nature, implementing Bayes theorem with the conventional deterministic computing can inevitably induce excessive computational cost and decision latency. Herein, we propose a probabilistic computing approach using memristors to implement Bayes theorem. We integrate volatile memristors with Boolean logics and, by exploiting the volatile stochastic switching of the memristors, realize Boolean operations with statistical probabilities and correlations, key for enabling Bayes theorem. To practically demonstrate the effectiveness of our memristor-enabled Bayes theorem approach in user-scene interactions, we design lightweight Bayesian inference and fusion operators using our probabilistic logics and apply the operators in road scene parsing for self-driving, including route planning and obstacle detection. The results show that our operators can achieve reliable decisions at a rate over 2,500 frames per second, outperforming human decision-making and the existing driving assistance systems.
Deep Learning-Based Longitudinal Prediction of Childhood Myopia Progression Using Fundus Image Sequences and Baseline Refraction Data
Jul 31, 2024

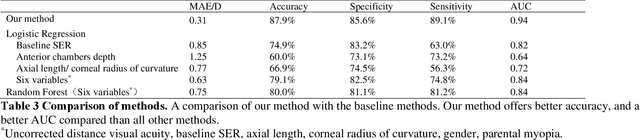
Childhood myopia constitutes a significant global health concern. It exhibits an escalating prevalence and has the potential to evolve into severe, irreversible conditions that detrimentally impact familial well-being and create substantial economic costs. Contemporary research underscores the importance of precisely predicting myopia progression to enable timely and effective interventions, thereby averting severe visual impairment in children. Such predictions predominantly rely on subjective clinical assessments, which are inherently biased and resource-intensive, thus hindering their widespread application. In this study, we introduce a novel, high-accuracy method for quantitatively predicting the myopic trajectory and myopia risk in children using only fundus images and baseline refraction data. This approach was validated through a six-year longitudinal study of 3,408 children in Henan, utilizing 16,211 fundus images and corresponding refractive data. Our method based on deep learning demonstrated predictive accuracy with an error margin of 0.311D per year and AUC scores of 0.944 and 0.995 for forecasting the risks of developing myopia and high myopia, respectively. These findings confirm the utility of our model in supporting early intervention strategies and in significantly reducing healthcare costs, particularly by obviating the need for additional metadata and repeated consultations. Furthermore, our method was designed to rely only on fundus images and refractive error data, without the need for meta data or multiple inquiries from doctors, strongly reducing the associated medical costs and facilitating large-scale screening. Our model can even provide good predictions based on only a single time measurement. Consequently, the proposed method is an important means to reduce medical inequities caused by economic disparities.
Self-reconfigurable Multifunctional Memristive Nociceptor for Intelligent Robotics
Jun 13, 2024Artificial nociceptors, mimicking human-like stimuli perception, are of significance for intelligent robotics to work in hazardous and dynamic scenarios. One of the most essential characteristics of the human nociceptor is its self-adjustable attribute, which indicates that the threshold of determination of a potentially hazardous stimulus relies on environmental knowledge. This critical attribute has been currently omitted, but it is highly desired for artificial nociceptors. Inspired by these shortcomings, this article presents, for the first time, a Self-Directed Channel (SDC) memristor-based self-reconfigurable nociceptor, capable of perceiving hazardous pressure stimuli under different temperatures and demonstrates key features of tactile nociceptors, including 'threshold,' 'no-adaptation,' and 'sensitization.' The maximum amplification of hazardous external stimuli is 1000%, and its response characteristics dynamically adapt to current temperature conditions by automatically altering the generated modulation schemes for the memristor. The maximum difference ratio of the response of memristors at different temperatures is 500%, and this adaptability closely mimics the functions of biological tactile nociceptors, resulting in accurate danger perception in various conditions. Beyond temperature adaptation, this memristor-based nociceptor has the potential to integrate different sensory modalities by applying various sensors, thereby achieving human-like perception capabilities in real-world environments.
Local stochastic computing using memristor-enabled stochastic logics
Feb 25, 2024Stochastic computing offers a probabilistic approach to address challenges posed by problems with uncertainty and noise in various fields, particularly machine learning. The realization of stochastic computing, however, faces the limitation of developing reliable stochastic logics. Here, we present stochastic logics development using memristors. Specifically, we integrate memristors into logic circuits to design the stochastic logics, wherein the inherent stochasticity in memristor switching is harnessed to enable stochastic number encoding and processing with well-regulated probabilities and correlations. As a practical application of the stochastic logics, we design a compact stochastic Roberts cross operator for edge detection. Remarkably, the operator demonstrates exceptional contour and texture extractions, even in the presence of 50% noise, and owning to the probabilistic nature and compact design, the operator can consume 95% less computational costs required by conventional binary computing. The results underscore the great potential of our stochastic computing approach as a lightweight local solution to machine learning challenges in autonomous driving, virtual reality, medical diagnosis, industrial automation, and beyond.
Intelligent machines work in unstructured environments by differential neural computing
Oct 03, 2023Expecting intelligent machines to efficiently work in real world requires a new method to understand unstructured information in unknown environments with good accuracy, scalability and generalization, like human. Here, a memristive neural computing based perceptual signal differential processing and learning method for intelligent machines is presented, via extracting main features of environmental information and applying associated encoded stimuli to memristors, we successfully obtain human-like ability in processing unstructured environmental information, such as amplification (>720%) and adaptation (<50%) of mechanical stimuli. The method also exhibits good scalability and generalization, validated in two typical applications of intelligent machines: object grasping and autonomous driving. In the former, a robot hand experimentally realizes safe and stable grasping, through learning unknown object features (e.g., sharp corner and smooth surface) with a single memristor in 1 ms. In the latter, the decision-making information of 10 unstructured environments in autonomous driving (e.g., overtaking cars, pedestrians) are accurately (94%) extracted with a 40x25 memristor array. By mimicking the intrinsic nature of human low-level perception mechanisms in electronic memristive neural circuits, the proposed method is adaptable to diverse sensing technologies, helping intelligent machines to generate smart high-level decisions in real world.