 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRASER: Recoverability-Aware Selective Escalation Router for Multi-Hop Question Answering
Jun 01, 2026Multi-hop question-answering systems often use expensive retrieval on every question. They may decompose the question, run several retrieval rounds, or search through bridge entities before answering. All of these strategies rely on repeated LLM calls to rewrite or decompose the question, which increases extra token cost, and it is not fitting when the LLM budget is tight. However, our analysis shows that lots of multi-hop questions are already answered correctly by a single one-shot RAG, so running an extra retrieval on every question wastes the budget. We introduce RASER (Recoverability-Aware Selective Escalation Router), a family of cheap routers built on one-shot RAG and six features from it. RASER-2 decides whether to stop or escalate to the extra-retrieval action PRUNE. RASER-3 chooses among one-shot RAG, PRUNE, and iterative retrieval IRCoT, using the same features but adding an explicit cost-accuracy trade-off. Neither router makes an extra LLM call to decide. Across six LLMs and three multi-hop QA benchmarks, both routers stay competitive with the other state-of-the-art (SOTA) baselines in F1 while spending only 41-49% of always-prune's tokens and also less than the iterative and decomposition retrieval baselines.
MoRE: A Mixture-of-Experts-Based Task-Adaptive End-to-End Network for Multimodal MRI Reconstruction
Jun 01, 2026Although accelerated MRI reconstruction has advanced rapidly through end-to-end learning, deploying a single unified network that generalizes across diverse anatomies and contrasts under constrained computational resources remains challenging. In this paper, we introduce MoRE, a sparsely activated mixture-of-experts (MoE) module integrated into an end-to-end variational network. MoRE couples a shared encoder with sample-wise, unsupervised routing to activate a minimal subset of expert decoders while strictly preserving physics-based data consistency. Evaluated on the fastMRI multi-coil brain and knee datasets under 8x undersampling, MoRE achieves highly stable SSIM and PSNR performance across multi-contrast datasets. Furthermore, t-SNE visualization of the routing embeddings reveals interpretable, modality-aware expert specialization. The sparse conditional computation mechanism ensures that the architectural overhead remains modest. These results demonstrate that MoE-style capacity scaling can significantly enhance general-purpose MRI reconstruction without requiring proportional increases in computational power.
Learning Agent-Compatible Context Management for Long-Horizon Tasks
May 29, 2026LLM agents increasingly face long-horizon tasks such as web search and deep research in real-world applications, where accumulated context can cause long-context degradation and reasoning failures. Prior work mitigates this through context management with agent-side context control or fixed strategies such as summarization, which require training the agent itself for adaptation - making it impractical for closed-source agents and ignoring that different agents may require different strategies. We introduce Adaptive Context Management (AdaCoM), which trains an external LLM to manage the context of a frozen agent through flexible modification actions and end-to-end reinforcement learning. Across diverse agents on web search and deep research benchmarks, AdaCoM substantially improves performance by preserving task constraints and progress while pruning stale content. The learned strategies reveal a Fidelity-Reliability Trade-off: agents with higher vanilla ReAct performance benefit from higher-fidelity context preservation, whereas lower-performing agents require more aggressive compression to stay within a reliable reasoning regime. Transfer experiments show that AdaCoM generalizes most effectively across agents with similar capability (measured by vanilla ReAct performance), suggesting a practical path toward reusable context managers for agent systems.
Industrial Surface Defect Detection via Diffusion Generation and Asymmetric Student-Teacher Network
Apr 21, 2026Industrial surface defect detection often suffers from limited defect samples, severe long-tailed distributions, and difficulties in accurately localizing subtle defects under complex backgrounds. To address these challenges, this paper proposes an unsupervised defect detection method that integrates a Denoising Diffusion Probabilistic Model (DDPM) with an asymmetric teacher-student architecture. First, at the data level, the DDPM is trained solely on normal samples. By introducing constant-variance Gaussian perturbations and Perlin noise-based masks, high-fidelity and physically consistent defect samples along with pixel-level annotations are generated, effectively alleviating the data scarcity problem. Second, at the model level, an asymmetric dual-stream network is constructed. The teacher network provides stable representations of normal features, while the student network reconstructs normal patterns and amplifies discrepancies between normal and anomalous regions. Finally, a joint optimization strategy combining cosine similarity loss and pixel-wise segmentation supervision is adopted to achieve precise localization of subtle defects. Experimental results on the MVTecAD dataset show that the proposed method achieves 98.4\% image-level AUROC and 98.3\% pixel-level AUROC, significantly outperforming existing unsupervised and mainstream deep learning methods. The proposed approach does not require large amounts of real defect samples and enables accurate and robust industrial defect detection and localization. \keywords{Industrial defect detection \and diffusion models \and data generation \and teacher-student architecture \and pixel-level localization}
Sim-and-Human Co-training for Data-Efficient and Generalizable Robotic Manipulation
Jan 27, 2026Synthetic simulation data and real-world human data provide scalable alternatives to circumvent the prohibitive costs of robot data collection. However, these sources suffer from the sim-to-real visual gap and the human-to-robot embodiment gap, respectively, which limits the policy's generalization to real-world scenarios. In this work, we identify a natural yet underexplored complementarity between these sources: simulation offers the robot action that human data lacks, while human data provides the real-world observation that simulation struggles to render. Motivated by this insight, we present SimHum, a co-training framework to simultaneously extract kinematic prior from simulated robot actions and visual prior from real-world human observations. Based on the two complementary priors, we achieve data-efficient and generalizable robotic manipulation in real-world tasks. Empirically, SimHum outperforms the baseline by up to $\mathbf{40\%}$ under the same data collection budget, and achieves a $\mathbf{62.5\%}$ OOD success with only 80 real data, outperforming the real only baseline by $7.1\times$. Videos and additional information can be found at \href{https://kaipengfang.github.io/sim-and-human}{project website}.
Branch Learning in MRI: More Data, More Models, More Training
Dec 23, 2025We investigated two complementary strategies for multicontrast cardiac MR reconstruction: physics-consistent data-space augmentation (DualSpaceCMR) and parameter-efficient capacity scaling via VQPrompt and Moero. DualSpaceCMR couples image-level transforms with kspace noise and motion simulations while preserving forwardmodel consistency. VQPrompt adds a lightweight bottleneck prompt; Moero embeds a sparse mixture of experts within a deep unrolled network with histogram-based routing. In the multivendor, multisite CMRxRecon25 benchmark, we evaluate fewshot and out-of-distribution generalization. On small datasets, k-space motion-plus-noise improves reconstruction; on the large benchmark it degrades performance, revealing sensitivity to augmentation ratio and schedule. VQPrompt produces modest and consistent gains with negligible memory overhead. Moero continues to improve after early plateaus and maintains baseline-like fewshot and out-of-distribution behavior despite mild overfitting, but sparse routing lowers PyTorch throughput and makes wall clock time the main bottleneck. These results motivate scale-aware augmentation and suggest prompt-based capacity scaling as a practical path, while efficiency improvements are crucial for sparse expert models.
Simultaneous Tactile-Visual Perception for Learning Multimodal Robot Manipulation
Dec 10, 2025Robotic manipulation requires both rich multimodal perception and effective learning frameworks to handle complex real-world tasks. See-through-skin (STS) sensors, which combine tactile and visual perception, offer promising sensing capabilities, while modern imitation learning provides powerful tools for policy acquisition. However, existing STS designs lack simultaneous multimodal perception and suffer from unreliable tactile tracking. Furthermore, integrating these rich multimodal signals into learning-based manipulation pipelines remains an open challenge. We introduce TacThru, an STS sensor enabling simultaneous visual perception and robust tactile signal extraction, and TacThru-UMI, an imitation learning framework that leverages these multimodal signals for manipulation. Our sensor features a fully transparent elastomer, persistent illumination, novel keyline markers, and efficient tracking, while our learning system integrates these signals through a Transformer-based Diffusion Policy. Experiments on five challenging real-world tasks show that TacThru-UMI achieves an average success rate of 85.5%, significantly outperforming the baselines of alternating tactile-visual (66.3%) and vision-only (55.4%). The system excels in critical scenarios, including contact detection with thin and soft objects and precision manipulation requiring multimodal coordination. This work demonstrates that combining simultaneous multimodal perception with modern learning frameworks enables more precise, adaptable robotic manipulation.
Evaluating the Performance of RAG Methods for Conversational AI in the Airport Domain
May 19, 2025Airports from the top 20 in terms of annual passengers are highly dynamic environments with thousands of flights daily, and they aim to increase the degree of automation. To contribute to this, we implemented a Conversational AI system that enables staff in an airport to communicate with flight information systems. This system not only answers standard airport queries but also resolves airport terminology, jargon, abbreviations, and dynamic questions involving reasoning. In this paper, we built three different Retrieval-Augmented Generation (RAG) methods, including traditional RAG, SQL RAG, and Knowledge Graph-based RAG (Graph RAG). Experiments showed that traditional RAG achieved 84.84% accuracy using BM25 + GPT-4 but occasionally produced hallucinations, which is risky to airport safety. In contrast, SQL RAG and Graph RAG achieved 80.85% and 91.49% accuracy respectively, with significantly fewer hallucinations. Moreover, Graph RAG was especially effective for questions that involved reasoning. Based on our observations, we thus recommend SQL RAG and Graph RAG are better for airport environments, due to fewer hallucinations and the ability to handle dynamic questions.
* Accepted by NAACL 2025 industry track
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Apr 26, 2025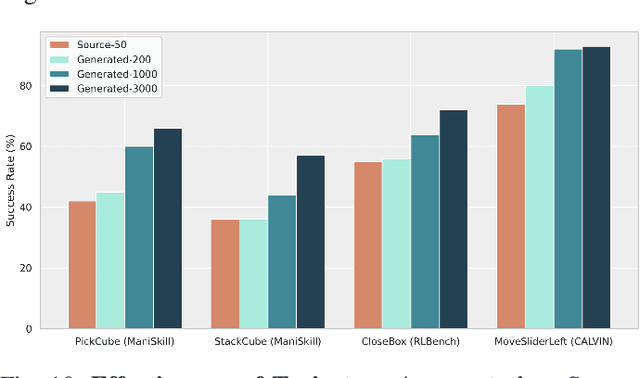
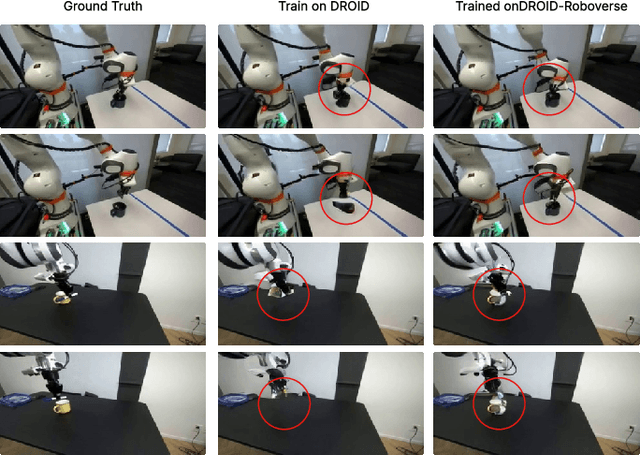
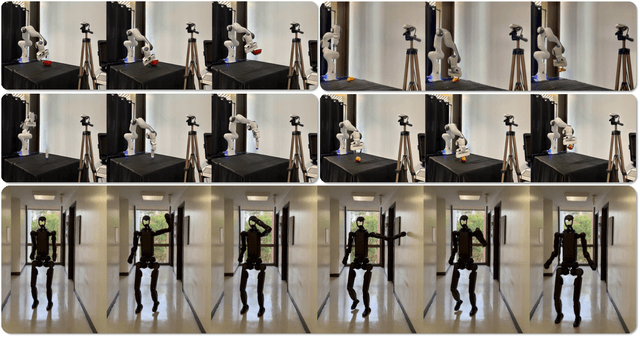
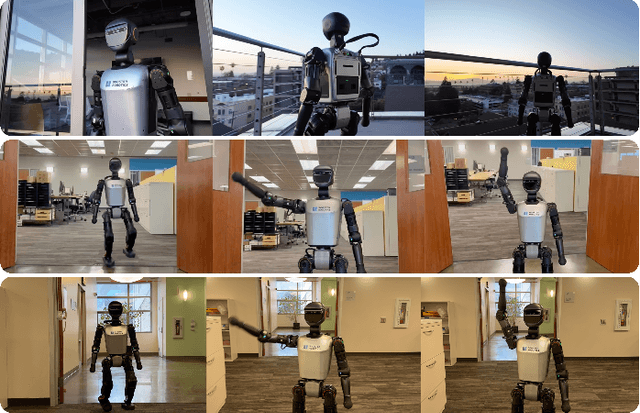
Data scaling and standardized evaluation benchmarks have driven significant advances in natural language processing and computer vision. However, robotics faces unique challenges in scaling data and establishing evaluation protocols. Collecting real-world data is resource-intensive and inefficient, while benchmarking in real-world scenarios remains highly complex. Synthetic data and simulation offer promising alternatives, yet existing efforts often fall short in data quality, diversity, and benchmark standardization. To address these challenges, we introduce RoboVerse, a comprehensive framework comprising a simulation platform, a synthetic dataset, and unified benchmarks. Our simulation platform supports multiple simulators and robotic embodiments, enabling seamless transitions between different environments. The synthetic dataset, featuring high-fidelity physics and photorealistic rendering, is constructed through multiple approaches. Additionally, we propose unified benchmarks for imitation learning and reinforcement learning, enabling evaluation across different levels of generalization. At the core of the simulation platform is MetaSim, an infrastructure that abstracts diverse simulation environments into a universal interface. It restructures existing simulation environments into a simulator-agnostic configuration system, as well as an API aligning different simulator functionalities, such as launching simulation environments, loading assets with initial states, stepping the physics engine, etc. This abstraction ensures interoperability and extensibility. Comprehensive experiments demonstrate that RoboVerse enhances the performance of imitation learning, reinforcement learning, world model learning, and sim-to-real transfer. These results validate the reliability of our dataset and benchmarks, establishing RoboVerse as a robust solution for advancing robot learning.
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation
Apr 17, 2025Tactile sensing is crucial for achieving human-level robotic capabilities in manipulation tasks. VBTSs have emerged as a promising solution, offering high spatial resolution and cost-effectiveness by sensing contact through camera-captured deformation patterns of elastic gel pads. However, these sensors' complex physical characteristics and visual signal processing requirements present unique challenges for robotic applications. The lack of efficient and accurate simulation tools for VBTS has significantly limited the scale and scope of tactile robotics research. Here we present Taccel, a high-performance simulation platform that integrates IPC and ABD to model robots, tactile sensors, and objects with both accuracy and unprecedented speed, achieving an 18-fold acceleration over real-time across thousands of parallel environments. Unlike previous simulators that operate at sub-real-time speeds with limited parallelization, Taccel provides precise physics simulation and realistic tactile signals while supporting flexible robot-sensor configurations through user-friendly APIs. Through extensive validation in object recognition, robotic grasping, and articulated object manipulation, we demonstrate precise simulation and successful sim-to-real transfer. These capabilities position Taccel as a powerful tool for scaling up tactile robotics research and development. By enabling large-scale simulation and experimentation with tactile sensing, Taccel accelerates the development of more capable robotic systems, potentially transforming how robots interact with and understand their physical environment.