 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe MOTIF Hand: A Robotic Hand for Multimodal Observations with Thermal, Inertial, and Force Sensors
Jun 24, 2025Advancing dexterous manipulation with multi-fingered robotic hands requires rich sensory capabilities, while existing designs lack onboard thermal and torque sensing. In this work, we propose the MOTIF hand, a novel multimodal and versatile robotic hand that extends the LEAP hand by integrating: (i) dense tactile information across the fingers, (ii) a depth sensor, (iii) a thermal camera, (iv), IMU sensors, and (v) a visual sensor. The MOTIF hand is designed to be relatively low-cost (under 4000 USD) and easily reproducible. We validate our hand design through experiments that leverage its multimodal sensing for two representative tasks. First, we integrate thermal sensing into 3D reconstruction to guide temperature-aware, safe grasping. Second, we show how our hand can distinguish objects with identical appearance but different masses - a capability beyond methods that use vision only.
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Apr 26, 2025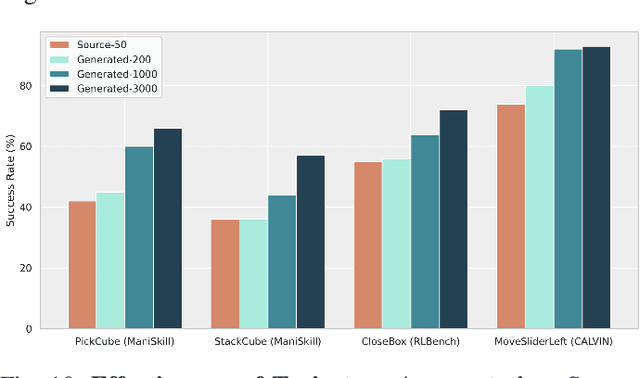
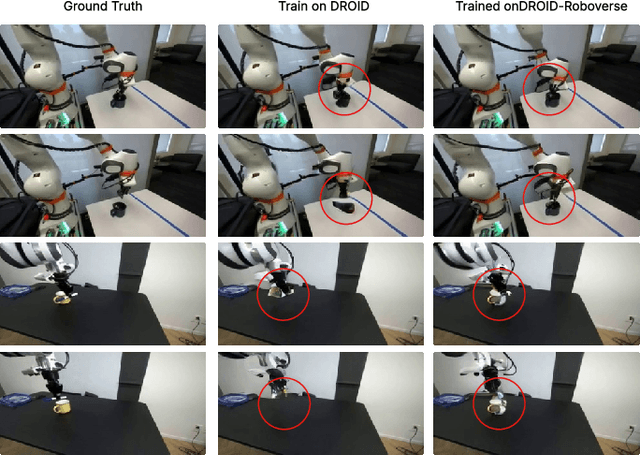
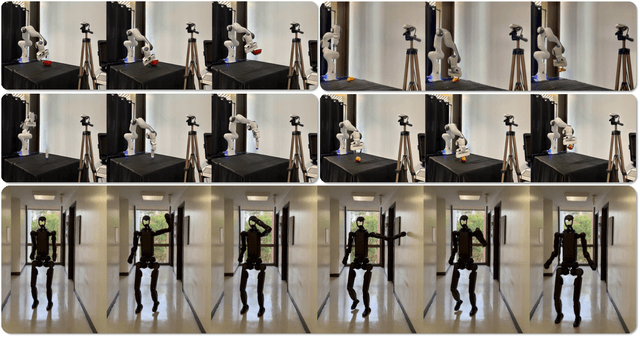
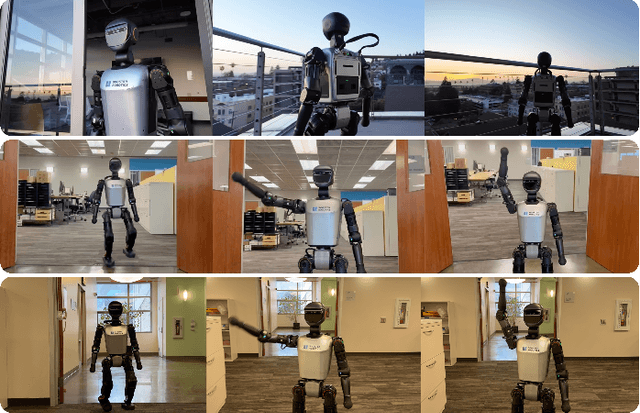
Data scaling and standardized evaluation benchmarks have driven significant advances in natural language processing and computer vision. However, robotics faces unique challenges in scaling data and establishing evaluation protocols. Collecting real-world data is resource-intensive and inefficient, while benchmarking in real-world scenarios remains highly complex. Synthetic data and simulation offer promising alternatives, yet existing efforts often fall short in data quality, diversity, and benchmark standardization. To address these challenges, we introduce RoboVerse, a comprehensive framework comprising a simulation platform, a synthetic dataset, and unified benchmarks. Our simulation platform supports multiple simulators and robotic embodiments, enabling seamless transitions between different environments. The synthetic dataset, featuring high-fidelity physics and photorealistic rendering, is constructed through multiple approaches. Additionally, we propose unified benchmarks for imitation learning and reinforcement learning, enabling evaluation across different levels of generalization. At the core of the simulation platform is MetaSim, an infrastructure that abstracts diverse simulation environments into a universal interface. It restructures existing simulation environments into a simulator-agnostic configuration system, as well as an API aligning different simulator functionalities, such as launching simulation environments, loading assets with initial states, stepping the physics engine, etc. This abstraction ensures interoperability and extensibility. Comprehensive experiments demonstrate that RoboVerse enhances the performance of imitation learning, reinforcement learning, world model learning, and sim-to-real transfer. These results validate the reliability of our dataset and benchmarks, establishing RoboVerse as a robust solution for advancing robot learning.
Robo-GS: A Physics Consistent Spatial-Temporal Model for Robotic Arm with Hybrid Representation
Aug 27, 2024Real2Sim2Real plays a critical role in robotic arm control and reinforcement learning, yet bridging this gap remains a significant challenge due to the complex physical properties of robots and the objects they manipulate. Existing methods lack a comprehensive solution to accurately reconstruct real-world objects with spatial representations and their associated physics attributes. We propose a Real2Sim pipeline with a hybrid representation model that integrates mesh geometry, 3D Gaussian kernels, and physics attributes to enhance the digital asset representation of robotic arms. This hybrid representation is implemented through a Gaussian-Mesh-Pixel binding technique, which establishes an isomorphic mapping between mesh vertices and Gaussian models. This enables a fully differentiable rendering pipeline that can be optimized through numerical solvers, achieves high-fidelity rendering via Gaussian Splatting, and facilitates physically plausible simulation of the robotic arm's interaction with its environment using mesh-based methods. The code,full presentation and datasets will be made publicly available at our website https://robostudioapp.com
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
Jul 27, 2023Nowadays, autonomous cars can drive smoothly in ordinary cases, and it is widely recognized that realistic sensor simulation will play a critical role in solving remaining corner cases by simulating them. To this end, we propose an autonomous driving simulator based upon neural radiance fields (NeRFs). Compared with existing works, ours has three notable features: (1) Instance-aware. Our simulator models the foreground instances and background environments separately with independent networks so that the static (e.g., size and appearance) and dynamic (e.g., trajectory) properties of instances can be controlled separately. (2) Modular. Our simulator allows flexible switching between different modern NeRF-related backbones, sampling strategies, input modalities, etc. We expect this modular design to boost academic progress and industrial deployment of NeRF-based autonomous driving simulation. (3) Realistic. Our simulator set new state-of-the-art photo-realism results given the best module selection. Our simulator will be open-sourced while most of our counterparts are not. Project page: https://open-air-sun.github.io/mars/.