 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLA-OPD: Bridging Offline SFT and Online RL for Vision-Language-Action Models via On-Policy Distillation
Mar 27, 2026Although pre-trained Vision-Language-Action (VLA) models exhibit impressive generalization in robotic manipulation, post-training remains crucial to ensure reliable performance during deployment. However, standard offline Supervised Fine-Tuning (SFT) suffers from distribution shifts and catastrophic forgetting of pre-trained capabilities, while online Reinforcement Learning (RL) struggles with sparse rewards and poor sample efficiency. In this paper, we propose On-Policy VLA Distillation (VLA-OPD), a framework bridging the efficiency of SFT with the robustness of RL. Instead of relying on sparse environmental rewards, VLA-OPD leverages an expert teacher to provide dense, token-level supervision on the student's self-generated trajectories. This enables active error correction on policy-induced states while preserving pre-trained general capabilities through gentle alignment. Crucially, we formulate VLA-OPD via a Reverse-KL objective. Unlike standard Forward-KL that induces mode-covering entropy explosion, or Hard-CE that causes premature entropy collapse, our bounded mode-seeking objective ensures stable policy learning by filtering out the teacher's epistemic uncertainty while maintaining action diversity. Experiments on LIBERO and RoboTwin2.0 benchmarks demonstrate that VLA-OPD significantly improves sample efficiency over RL and robustness over SFT, while effectively mitigating catastrophic forgetting during post-training.
DualCoT-VLA: Visual-Linguistic Chain of Thought via Parallel Reasoning for Vision-Language-Action Models
Mar 23, 2026Vision-Language-Action (VLA) models map visual observations and language instructions directly to robotic actions. While effective for simple tasks, standard VLA models often struggle with complex, multi-step tasks requiring logical planning, as well as precise manipulations demanding fine-grained spatial perception. Recent efforts have incorporated Chain-of-Thought (CoT) reasoning to endow VLA models with a ``thinking before acting'' capability. However, current CoT-based VLA models face two critical limitations: 1) an inability to simultaneously capture low-level visual details and high-level logical planning due to their reliance on isolated, single-modal CoT; 2) high inference latency with compounding errors caused by step-by-step autoregressive decoding. To address these limitations, we propose DualCoT-VLA, a visual-linguistic CoT method for VLA models with a parallel reasoning mechanism. To achieve comprehensive multi-modal reasoning, our method integrates a visual CoT for low-level spatial understanding and a linguistic CoT for high-level task planning. Furthermore, to overcome the latency bottleneck, we introduce a parallel CoT mechanism that incorporates two sets of learnable query tokens, shifting autoregressive reasoning to single-step forward reasoning. Extensive experiments demonstrate that our DualCoT-VLA achieves state-of-the-art performance on the LIBERO and RoboCasa GR1 benchmarks, as well as in real-world platforms.
DyGeoVLN: Infusing Dynamic Geometry Foundation Model into Vision-Language Navigation
Mar 22, 2026Vision-language Navigation (VLN) requires an agent to understand visual observations and language instructions to navigate in unseen environments. Most existing approaches rely on static scene assumptions and struggle to generalize in dynamic, real-world scenarios. To address this challenge, we propose DyGeoVLN, a dynamic geometry-aware VLN framework. Our method infuses a dynamic geometry foundation model into the VLN framework through cross-branch feature fusion to enable explicit 3D spatial representation and visual-semantic reasoning. To efficiently compress historical token information in long-horizon, dynamic navigation, we further introduce a novel pose-free and adaptive-resolution token-pruning strategy. This strategy can remove spatio-temporal redundant tokens to reduce inference cost. Extensive experiments demonstrate that our approach achieves state-of-the-art performance on multiple benchmarks and exhibits strong robustness in real-world environments.
S-VAM: Shortcut Video-Action Model by Self-Distilling Geometric and Semantic Foresight
Mar 17, 2026Video action models (VAMs) have emerged as a promising paradigm for robot learning, owing to their powerful visual foresight for complex manipulation tasks. However, current VAMs, typically relying on either slow multi-step video generation or noisy one-step feature extraction, cannot simultaneously guarantee real-time inference and high-fidelity foresight. To address this limitation, we propose S-VAM, a shortcut video-action model that foresees coherent geometric and semantic representations via a single forward pass. Serving as a stable blueprint, these foreseen representations significantly simplify the action prediction. To enable this efficient shortcut, we introduce a novel self-distillation strategy that condenses structured generative priors of multi-step denoising into one-step inference. Specifically, vision foundation model (VFM) representations extracted from the diffusion model's own multi-step generated videos provide teacher targets. Lightweight decouplers, as students, learn to directly map noisy one-step features to these targets. Extensive experiments in simulation and the real world demonstrate that our S-VAM outperforms state-of-the-art methods, enabling efficient and precise manipulation in complex environments. Our project page is https://haodong-yan.github.io/S-VAM/
Rethinking the Practicality of Vision-language-action Model: A Comprehensive Benchmark and An Improved Baseline
Feb 26, 2026Vision-Language-Action (VLA) models have emerged as a generalist robotic agent. However, existing VLAs are hindered by excessive parameter scales, prohibitive pre-training requirements, and limited applicability to diverse embodiments. To improve the practicality of VLAs, we propose a comprehensive benchmark and an improved baseline. First, we propose CEBench, a new benchmark spanning diverse embodiments in both simulation and the real world with consideration of domain randomization. We collect 14.4k simulated trajectories and 1.6k real-world expert-curated trajectories to support training on CEBench. Second, using CEBench as our testbed, we study three critical aspects of VLAs' practicality and offer several key findings. Informed by these findings, we introduce LLaVA-VLA, a lightweight yet powerful VLA designed for practical deployment on consumer-grade GPUs. Architecturally, it integrates a compact VLM backbone with multi-view perception, proprioceptive tokenization, and action chunking. To eliminate reliance on costly pre-training, LLaVA-VLA adopts a two-stage training paradigm including post-training and fine-tuning. Furthermore, LLaVA-VLA extends the action space to unify navigation and manipulation. Experiments across embodiments demonstrate the capabilities of generalization and versatility of LLaVA-VLA , while real-world mobile manipulation experiments establish it as the first end-to-end VLA model for mobile manipulation. We will open-source all datasets, codes, and checkpoints upon acceptance to foster reproducibility and future research.
Embodied Robot Manipulation in the Era of Foundation Models: Planning and Learning Perspectives
Dec 28, 2025Recent advances in vision, language, and multimodal learning have substantially accelerated progress in robotic foundation models, with robot manipulation remaining a central and challenging problem. This survey examines robot manipulation from an algorithmic perspective and organizes recent learning-based approaches within a unified abstraction of high-level planning and low-level control. At the high level, we extend the classical notion of task planning to include reasoning over language, code, motion, affordances, and 3D representations, emphasizing their role in structured and long-horizon decision making. At the low level, we propose a training-paradigm-oriented taxonomy for learning-based control, organizing existing methods along input modeling, latent representation learning, and policy learning. Finally, we identify open challenges and prospective research directions related to scalability, data efficiency, multimodal physical interaction, and safety. Together, these analyses aim to clarify the design space of modern foundation models for robotic manipulation.
FlowVLA: Thinking in Motion with a Visual Chain of Thought
Aug 25, 2025Many Vision-Language-Action (VLA) models rely on an internal world model trained via next-frame prediction. This approach, however, struggles with physical reasoning as it entangles static appearance with dynamic motion, often resulting in implausible visual forecasts and inefficient policy learning. To address these limitations, we introduce the Visual Chain of Thought (Visual CoT): a pre-training framework that encourages a model to reason about how a scene evolves before predicting what it will look like. We instantiate this principle in FlowVLA, which predicts a future frame ($v_{t+1}$) only after generating an intermediate optical flow representation ($f_t$) that encodes motion dynamics. This ``$v_t \rightarrow f_t \rightarrow v_{t+1}$'' reasoning process is implemented within a single autoregressive Transformer, guiding the model to learn disentangled dynamics. As a result, FlowVLA produces coherent visual predictions and facilitates more efficient policy learning. Experiments on challenging robotics manipulation benchmarks demonstrate state-of-the-art performance with substantially improved sample efficiency, pointing toward a more principled foundation for world modeling. Project page: https://irpn-lab.github.io/FlowVLA/
Accelerating Vision-Language-Action Model Integrated with Action Chunking via Parallel Decoding
Mar 04, 2025Vision-Language-Action (VLA) models demonstrate remarkable potential for generalizable robotic manipulation. The performance of VLA models can be improved by integrating with action chunking, a critical technique for effective control. However, action chunking linearly scales up action dimensions in VLA models with increased chunking sizes. This reduces the inference efficiency. To tackle this problem, we propose PD-VLA, the first parallel decoding framework for VLA models integrated with action chunking. Our framework reformulates autoregressive decoding as a nonlinear system solved by parallel fixed-point iterations. This approach preserves model performance with mathematical guarantees while significantly improving decoding speed. In addition, it enables training-free acceleration without architectural changes, as well as seamless synergy with existing acceleration techniques. Extensive simulations validate that our PD-VLA maintains competitive success rates while achieving 2.52 times execution frequency on manipulators (with 7 degrees of freedom) compared with the fundamental VLA model. Furthermore, we experimentally identify the most effective settings for acceleration. Finally, real-world experiments validate its high applicability across different tasks.
ASSIST: Interactive Scene Nodes for Scalable and Realistic Indoor Simulation
Nov 10, 2023


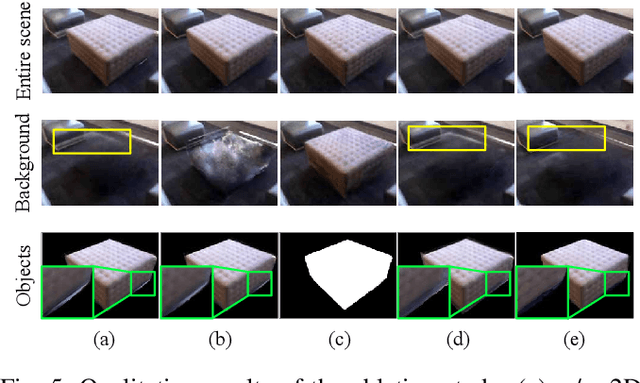
We present ASSIST, an object-wise neural radiance field as a panoptic representation for compositional and realistic simulation. Central to our approach is a novel scene node data structure that stores the information of each object in a unified fashion, allowing online interaction in both intra- and cross-scene settings. By incorporating a differentiable neural network along with the associated bounding box and semantic features, the proposed structure guarantees user-friendly interaction on independent objects to scale up novel view simulation. Objects in the scene can be queried, added, duplicated, deleted, transformed, or swapped simply through mouse/keyboard controls or language instructions. Experiments demonstrate the efficacy of the proposed method, where scaled realistic simulation can be achieved through interactive editing and compositional rendering, with color images, depth images, and panoptic segmentation masks generated in a 3D consistent manner.
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
Jul 27, 2023Nowadays, autonomous cars can drive smoothly in ordinary cases, and it is widely recognized that realistic sensor simulation will play a critical role in solving remaining corner cases by simulating them. To this end, we propose an autonomous driving simulator based upon neural radiance fields (NeRFs). Compared with existing works, ours has three notable features: (1) Instance-aware. Our simulator models the foreground instances and background environments separately with independent networks so that the static (e.g., size and appearance) and dynamic (e.g., trajectory) properties of instances can be controlled separately. (2) Modular. Our simulator allows flexible switching between different modern NeRF-related backbones, sampling strategies, input modalities, etc. We expect this modular design to boost academic progress and industrial deployment of NeRF-based autonomous driving simulation. (3) Realistic. Our simulator set new state-of-the-art photo-realism results given the best module selection. Our simulator will be open-sourced while most of our counterparts are not. Project page: https://open-air-sun.github.io/mars/.