 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNot all tokens contribute equally to diffusion learning
Apr 08, 2026With the rapid development of conditional diffusion models, significant progress has been made in text-to-video generation. However, we observe that these models often neglect semantically important tokens during inference, leading to biased or incomplete generations under classifier-free guidance. We attribute this issue to two key factors: distributional bias caused by the long-tailed token frequency in training data, and spatial misalignment in cross-attention where semantically important tokens are overshadowed by less informative ones. To address these issues, we propose Distribution-Aware Rectification and Spatial Ensemble (DARE), a unified framework that improves semantic guidance in diffusion models from the perspectives of distributional debiasing and spatial consistency. First, we introduce Distribution-Rectified Classifier-Free Guidance (DR-CFG), which regularizes the training process by dynamically suppressing dominant tokens with low semantic density, encouraging the model to better capture underrepresented semantic cues and learn a more balanced conditional distribution. This design mitigates the risk of the model distribution overfitting to tokens with low semantic density. Second, we propose Spatial Representation Alignment (SRA), which adaptively reweights cross-attention maps according to token importance and enforces representation consistency, enabling semantically important tokens to exert stronger spatial guidance during generation. This mechanism effectively prevents low semantic-density tokens from dominating the attention allocation, thereby avoiding the dilution of the spatial and distributional guidance provided by high semantic-density tokens. Extensive experiments on multiple benchmark datasets demonstrate that DARE consistently improves generation fidelity and semantic alignment, achieving significant gains over existing approaches.
ScDiVa: Masked Discrete Diffusion for Joint Modeling of Single-Cell Identity and Expression
Feb 03, 2026Single-cell RNA-seq profiles are high-dimensional, sparse, and unordered, causing autoregressive generation to impose an artificial ordering bias and suffer from error accumulation. To address this, we propose scDiVa, a masked discrete diffusion foundation model that aligns generation with the dropout-like corruption process by defining a continuous-time forward masking mechanism in token space. ScDiVa features a bidirectional denoiser that jointly models discrete gene identities and continuous values, utilizing entropy-normalized serialization and a latent anchor token to maximize information efficiency and preserve global cell identity. The model is trained via depth-invariant time sampling and a dual denoising objective to simulate varying sparsity levels while ensuring precise recovery of both identity and magnitude. Pre-trained on 59 million cells, scDiVa achieves strong transfer performance across major benchmarks, including batch integration, cell type annotation, and perturbation response prediction. These results suggest that masked discrete diffusion serves as a biologically coherent and effective alternative to autoregression.
Dual-Thresholding Heatmaps to Cluster Proposals for Weakly Supervised Object Detection
Sep 10, 2025



Weakly supervised object detection (WSOD) has attracted significant attention in recent years, as it does not require box-level annotations. State-of-the-art methods generally adopt a multi-module network, which employs WSDDN as the multiple instance detection network module and multiple instance refinement modules to refine performance. However, these approaches suffer from three key limitations. First, existing methods tend to generate pseudo GT boxes that either focus only on discriminative parts, failing to capture the whole object, or cover the entire object but fail to distinguish between adjacent intra-class instances. Second, the foundational WSDDN architecture lacks a crucial background class representation for each proposal and exhibits a large semantic gap between its branches. Third, prior methods discard ignored proposals during optimization, leading to slow convergence. To address these challenges, we first design a heatmap-guided proposal selector (HGPS) algorithm, which utilizes dual thresholds on heatmaps to pre-select proposals, enabling pseudo GT boxes to both capture the full object extent and distinguish between adjacent intra-class instances. We then present a weakly supervised basic detection network (WSBDN), which augments each proposal with a background class representation and uses heatmaps for pre-supervision to bridge the semantic gap between matrices. At last, we introduce a negative certainty supervision loss on ignored proposals to accelerate convergence. Extensive experiments on the challenging PASCAL VOC 2007 and 2012 datasets demonstrate the effectiveness of our framework. We achieve mAP/mCorLoc scores of 58.5%/81.8% on VOC 2007 and 55.6%/80.5% on VOC 2012, performing favorably against the state-of-the-art WSOD methods. Our code is publicly available at https://github.com/gyl2565309278/DTH-CP.
Condition Weaving Meets Expert Modulation: Towards Universal and Controllable Image Generation
Aug 24, 2025The image-to-image generation task aims to produce controllable images by leveraging conditional inputs and prompt instructions. However, existing methods often train separate control branches for each type of condition, leading to redundant model structures and inefficient use of computational resources. To address this, we propose a Unified image-to-image Generation (UniGen) framework that supports diverse conditional inputs while enhancing generation efficiency and expressiveness. Specifically, to tackle the widely existing parameter redundancy and computational inefficiency in controllable conditional generation architectures, we propose the Condition Modulated Expert (CoMoE) module. This module aggregates semantically similar patch features and assigns them to dedicated expert modules for visual representation and conditional modeling. By enabling independent modeling of foreground features under different conditions, CoMoE effectively mitigates feature entanglement and redundant computation in multi-condition scenarios. Furthermore, to bridge the information gap between the backbone and control branches, we propose WeaveNet, a dynamic, snake-like connection mechanism that enables effective interaction between global text-level control from the backbone and fine-grained control from conditional branches. Extensive experiments on the Subjects-200K and MultiGen-20M datasets across various conditional image generation tasks demonstrate that our method consistently achieves state-of-the-art performance, validating its advantages in both versatility and effectiveness. The code has been uploaded to https://github.com/gavin-gqzhang/UniGen.
DISCOVERSE: Efficient Robot Simulation in Complex High-Fidelity Environments
Jul 29, 2025We present the first unified, modular, open-source 3DGS-based simulation framework for Real2Sim2Real robot learning. It features a holistic Real2Sim pipeline that synthesizes hyper-realistic geometry and appearance of complex real-world scenarios, paving the way for analyzing and bridging the Sim2Real gap. Powered by Gaussian Splatting and MuJoCo, Discoverse enables massively parallel simulation of multiple sensor modalities and accurate physics, with inclusive supports for existing 3D assets, robot models, and ROS plugins, empowering large-scale robot learning and complex robotic benchmarks. Through extensive experiments on imitation learning, Discoverse demonstrates state-of-the-art zero-shot Sim2Real transfer performance compared to existing simulators. For code and demos: https://air-discoverse.github.io/.
A Koopman Operator-based NMPC Framework for Mobile Robot Navigation under Uncertainty
Apr 29, 2025

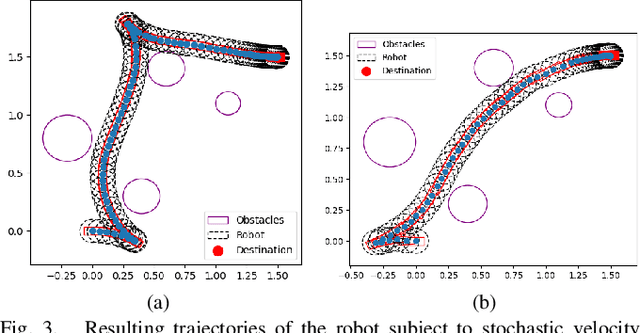

Mobile robot navigation can be challenged by system uncertainty. For example, ground friction may vary abruptly causing slipping, and noisy sensor data can lead to inaccurate feedback control. Traditional model-based methods may be limited when considering such variations, making them fragile to varying types of uncertainty. One way to address this is by leveraging learned prediction models by means of the Koopman operator into nonlinear model predictive control (NMPC). This paper describes the formulation of, and provides the solution to, an NMPC problem using a lifted bilinear model that can accurately predict affine input systems with stochastic perturbations. System constraints are defined in the Koopman space, while the optimization problem is solved in the state space to reduce computational complexity. Training data to estimate the Koopman operator for the system are given via randomized control inputs. The output of the developed method enables closed-loop navigation control over environments populated with obstacles. The effectiveness of the proposed method has been tested through numerical simulations using a wheeled robot with additive stochastic velocity perturbations, Gazebo simulations with a realistic digital twin robot, and physical hardware experiments without knowledge of the true dynamics.
An Real-Sim-Real (RSR) Loop Framework for Generalizable Robotic Policy Transfer with Differentiable Simulation
Mar 13, 2025The sim-to-real gap remains a critical challenge in robotics, hindering the deployment of algorithms trained in simulation to real-world systems. This paper introduces a novel Real-Sim-Real (RSR) loop framework leveraging differentiable simulation to address this gap by iteratively refining simulation parameters, aligning them with real-world conditions, and enabling robust and efficient policy transfer. A key contribution of our work is the design of an informative cost function that encourages the collection of diverse and representative real-world data, minimizing bias and maximizing the utility of each data point for simulation refinement. This cost function integrates seamlessly into existing reinforcement learning algorithms (e.g., PPO, SAC) and ensures a balanced exploration of critical regions in the real domain. Furthermore, our approach is implemented on the versatile Mujoco MJX platform, and our framework is compatible with a wide range of robotic systems. Experimental results on several robotic manipulation tasks demonstrate that our method significantly reduces the sim-to-real gap, achieving high task performance and generalizability across diverse scenarios of both explicit and implicit environmental uncertainties.
Bridging the Resource Gap: Deploying Advanced Imitation Learning Models onto Affordable Embedded Platforms
Nov 18, 2024



Advanced imitation learning with structures like the transformer is increasingly demonstrating its advantages in robotics. However, deploying these large-scale models on embedded platforms remains a major challenge. In this paper, we propose a pipeline that facilitates the migration of advanced imitation learning algorithms to edge devices. The process is achieved via an efficient model compression method and a practical asynchronous parallel method Temporal Ensemble with Dropped Actions (TEDA) that enhances the smoothness of operations. To show the efficiency of the proposed pipeline, large-scale imitation learning models are trained on a server and deployed on an edge device to complete various manipulation tasks.
Robo-GS: A Physics Consistent Spatial-Temporal Model for Robotic Arm with Hybrid Representation
Aug 27, 2024Real2Sim2Real plays a critical role in robotic arm control and reinforcement learning, yet bridging this gap remains a significant challenge due to the complex physical properties of robots and the objects they manipulate. Existing methods lack a comprehensive solution to accurately reconstruct real-world objects with spatial representations and their associated physics attributes. We propose a Real2Sim pipeline with a hybrid representation model that integrates mesh geometry, 3D Gaussian kernels, and physics attributes to enhance the digital asset representation of robotic arms. This hybrid representation is implemented through a Gaussian-Mesh-Pixel binding technique, which establishes an isomorphic mapping between mesh vertices and Gaussian models. This enables a fully differentiable rendering pipeline that can be optimized through numerical solvers, achieves high-fidelity rendering via Gaussian Splatting, and facilitates physically plausible simulation of the robotic arm's interaction with its environment using mesh-based methods. The code,full presentation and datasets will be made publicly available at our website https://robostudioapp.com
Koopman Operators in Robot Learning
Aug 08, 2024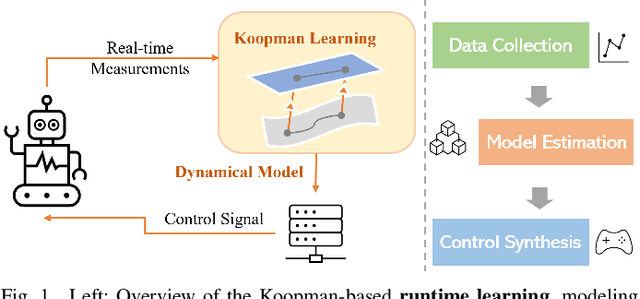
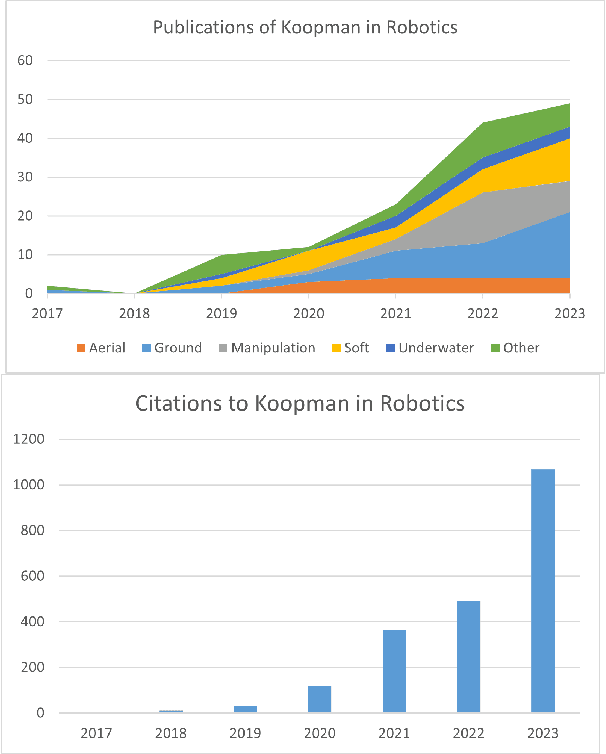
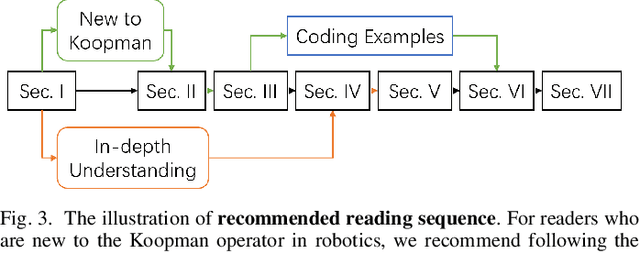
Koopman operator theory offers a rigorous treatment of dynamics and has been emerging as a powerful modeling and learning-based control method enabling significant advancements across various domains of robotics. Due to its ability to represent nonlinear dynamics as a linear operator, Koopman theory offers a fresh lens through which to understand and tackle the modeling and control of complex robotic systems. Moreover, it enables incremental updates and is computationally inexpensive making it particularly appealing for real-time applications and online active learning. This review comprehensively presents recent research results on advancing Koopman operator theory across diverse domains of robotics, encompassing aerial, legged, wheeled, underwater, soft, and manipulator robotics. Furthermore, it offers practical tutorials to help new users get started as well as a treatise of more advanced topics leading to an outlook on future directions and open research questions. Taken together, these provide insights into the potential evolution of Koopman theory as applied to the field of robotics.