 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDISCOVERSE: Efficient Robot Simulation in Complex High-Fidelity Environments
Jul 29, 2025We present the first unified, modular, open-source 3DGS-based simulation framework for Real2Sim2Real robot learning. It features a holistic Real2Sim pipeline that synthesizes hyper-realistic geometry and appearance of complex real-world scenarios, paving the way for analyzing and bridging the Sim2Real gap. Powered by Gaussian Splatting and MuJoCo, Discoverse enables massively parallel simulation of multiple sensor modalities and accurate physics, with inclusive supports for existing 3D assets, robot models, and ROS plugins, empowering large-scale robot learning and complex robotic benchmarks. Through extensive experiments on imitation learning, Discoverse demonstrates state-of-the-art zero-shot Sim2Real transfer performance compared to existing simulators. For code and demos: https://air-discoverse.github.io/.
Omni-Perception: Omnidirectional Collision Avoidance for Legged Locomotion in Dynamic Environments
May 25, 2025Agile locomotion in complex 3D environments requires robust spatial awareness to safely avoid diverse obstacles such as aerial clutter, uneven terrain, and dynamic agents. Depth-based perception approaches often struggle with sensor noise, lighting variability, computational overhead from intermediate representations (e.g., elevation maps), and difficulties with non-planar obstacles, limiting performance in unstructured environments. In contrast, direct integration of LiDAR sensing into end-to-end learning for legged locomotion remains underexplored. We propose Omni-Perception, an end-to-end locomotion policy that achieves 3D spatial awareness and omnidirectional collision avoidance by directly processing raw LiDAR point clouds. At its core is PD-RiskNet (Proximal-Distal Risk-Aware Hierarchical Network), a novel perception module that interprets spatio-temporal LiDAR data for environmental risk assessment. To facilitate efficient policy learning, we develop a high-fidelity LiDAR simulation toolkit with realistic noise modeling and fast raycasting, compatible with platforms such as Isaac Gym, Genesis, and MuJoCo, enabling scalable training and effective sim-to-real transfer. Learning reactive control policies directly from raw LiDAR data enables the robot to navigate complex environments with static and dynamic obstacles more robustly than approaches relying on intermediate maps or limited sensing. We validate Omni-Perception through real-world experiments and extensive simulation, demonstrating strong omnidirectional avoidance capabilities and superior locomotion performance in highly dynamic environments. We will open-source our code and models.
An Real-Sim-Real (RSR) Loop Framework for Generalizable Robotic Policy Transfer with Differentiable Simulation
Mar 13, 2025The sim-to-real gap remains a critical challenge in robotics, hindering the deployment of algorithms trained in simulation to real-world systems. This paper introduces a novel Real-Sim-Real (RSR) loop framework leveraging differentiable simulation to address this gap by iteratively refining simulation parameters, aligning them with real-world conditions, and enabling robust and efficient policy transfer. A key contribution of our work is the design of an informative cost function that encourages the collection of diverse and representative real-world data, minimizing bias and maximizing the utility of each data point for simulation refinement. This cost function integrates seamlessly into existing reinforcement learning algorithms (e.g., PPO, SAC) and ensures a balanced exploration of critical regions in the real domain. Furthermore, our approach is implemented on the versatile Mujoco MJX platform, and our framework is compatible with a wide range of robotic systems. Experimental results on several robotic manipulation tasks demonstrate that our method significantly reduces the sim-to-real gap, achieving high task performance and generalizability across diverse scenarios of both explicit and implicit environmental uncertainties.
Arm-Constrained Curriculum Learning for Loco-Manipulation of the Wheel-Legged Robot
Mar 28, 2024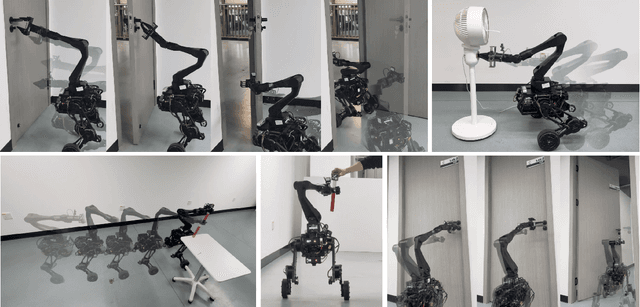
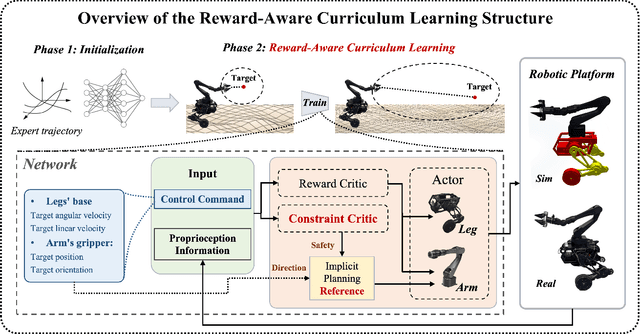
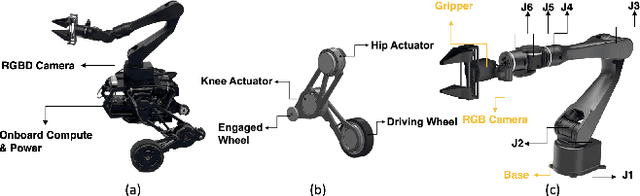
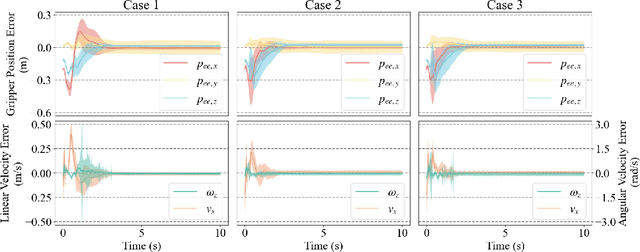
Incorporating a robotic manipulator into a wheel-legged robot enhances its agility and expands its potential for practical applications. However, the presence of potential instability and uncertainties presents additional challenges for control objectives. In this paper, we introduce an arm-constrained curriculum learning architecture to tackle the issues introduced by adding the manipulator. Firstly, we develop an arm-constrained reinforcement learning algorithm to ensure safety and stability in control performance. Additionally, to address discrepancies in reward settings between the arm and the base, we propose a reward-aware curriculum learning method. The policy is first trained in Isaac gym and transferred to the physical robot to do dynamic grasping tasks, including the door-opening task, fan-twitching task and the relay-baton-picking and following task. The results demonstrate that our proposed approach effectively controls the arm-equipped wheel-legged robot to master dynamic grasping skills, allowing it to chase and catch a moving object while in motion. Please refer to our website (https://acodedog.github.io/wheel-legged-loco-manipulation) for the code and supplemental videos.